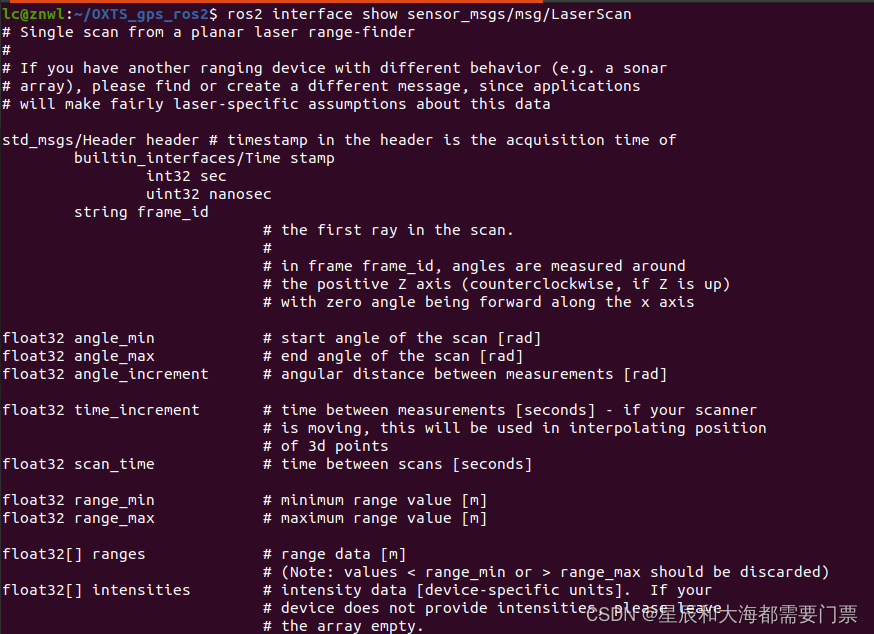
2.3 接口消息格式查看与自定义消息格式







于 2022-06-10 15:30:16 首次发布
 2199
2191
2199
2191











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言








 订阅专栏 解锁全文
订阅专栏 解锁全文























