







目录
4.2 更新局部关键帧(mvpLocalKeyFrames)
4.3 更新当前帧的参考关键帧,与自己共视程度最高的关键帧作为参考关键帧
1.函数作用
跟踪局部地图函数里,更新局部关键帧。
2. 函数步骤
方法是遍历当前帧的地图点,将观测到这些地图点的关键帧和相邻的关键帧及其父子关键帧,作为mvpLocalKeyFrames。
Step 1:遍历当前帧的地图点,记录所有能观测到当前帧地图点的关键帧
Step 2:更新局部关键帧(mvpLocalKeyFrames),添加局部关键帧包括以下3种类型
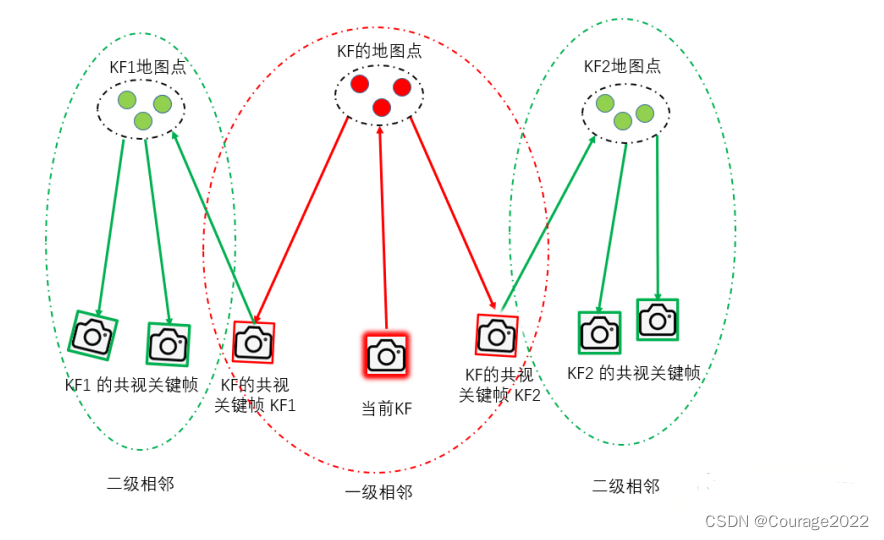
* 类型1:能观测到当前帧地图点的关键帧,也称一级共视关键帧
* 类型2:一级共视关键帧的共视关键帧,称为二级共视关键帧
* 类型3:一级共视关键帧的子关键帧、父关键帧
Step 3:更新当前帧的参考关键帧,与自己共视程度最高的关键帧作为参考关键帧
3.code
void Tracking::UpdateLocalKeyFrames() { // Each map point vote for the keyframes in which it has been observed // Step 1:遍历当前帧的地图点,记录所有能观测到当前帧地图点的关键帧 map<KeyFrame*,int> keyframeCounter; for(int i=0; i<mCurrentFrame.N; i++) { if(mCurrentFrame.mvpMapPoints[i]) { MapPoint* pMP = mCurrentFrame.mvpMapPoints[i]; if(!pMP->isBad()) { // 得到观测到该地图点的关键帧和该地图点在关键帧中的索引 const map<KeyFrame*,size_t> observations = pMP->GetObservations(); // 由于一个地图点可以被多个关键帧观测到,因此对于每一次观测,都对观测到这个地图点的关键帧进行累计投票 for(map<KeyFrame*,size_t>::const_iterator it=observations.begin(), itend=observations.end(); it!=itend; it++) // 这里的操作非常精彩! // map[key] = value,当要插入的键存在时,会覆盖键对应的原来的值。如果键不存在,则添加一组键值对 // it->first 是地图点看到的关键帧,同一个关键帧看到的地图点会累加到该关键帧计数 // 所以最后keyframeCounter 第一个参数表示某个关键帧,第2个参数表示该关键帧看到了多少当前帧(mCurrentFrame)的地图点,也就是共视程度 keyframeCounter[it->first]++; } else { mCurrentFrame.mvpMapPoints[i]=NULL; } } } // 没有当前帧没有共视关键帧,返回 if(keyframeCounter.empty()) return; // 存储具有最多观测次数(max)的关键帧 int max=0; KeyFrame* pKFmax= static_cast<KeyFrame*>(NULL); // Step 2:更新局部关键帧(mvpLocalKeyFrames),添加局部关键帧有3种类型 // 先清空局部关键帧 mvpLocalKeyFrames.clear(); // 先申请3倍内存,不够后面再加 mvpLocalKeyFrames.reserve(3*keyframeCounter.size()); // All keyframes that observe a map point are included in the local map. Also check which keyframe shares most points // Step 2.1 类型1:能观测到当前帧地图点的关键帧作为局部关键帧 (将邻居拉拢入伙)(一级共视关键帧) for(map<KeyFrame*,int>::const_iterator it=keyframeCounter.begin(), itEnd=keyframeCounter.end(); it!=itEnd; it++) { KeyFrame* pKF = it->first; // 如果设定为要删除的,跳过 if(pKF->isBad()) continue; // 寻找具有最大观测数目的关键帧 if(it->second>max) { max=it->second; pKFmax=pKF; } // 添加到局部关键帧的列表里 mvpLocalKeyFrames.push_back(it->first); // 用该关键帧的成员变量mnTrackReferenceForFrame 记录当前帧的id // 表示它已经是当前帧的局部关键帧了,可以防止重复添加局部关键帧 pKF->mnTrackReferenceForFrame = mCurrentFrame.mnId; } // Include also some not-already-included keyframes that are neighbors to already-included keyframes // Step 2.2 遍历一级共视关键帧,寻找更多的局部关键帧 for(vector<KeyFrame*>::const_iterator itKF=mvpLocalKeyFrames.begin(), itEndKF=mvpLocalKeyFrames.end(); itKF!=itEndKF; itKF++) { // Limit the number of keyframes // 处理的局部关键帧不超过80帧 if(mvpLocalKeyFrames.size()>80) break; KeyFrame* pKF = *itKF; // 类型2:一级共视关键帧的共视(前10个)关键帧,称为二级共视关键帧(将邻居的邻居拉拢入伙) // 如果共视帧不足10帧,那么就返回所有具有共视关系的关键帧 const vector<KeyFrame*> vNeighs = pKF->GetBestCovisibilityKeyFrames(10); // vNeighs 是按照共视程度从大到小排列 for(vector<KeyFrame*>::const_iterator itNeighKF=vNeighs.begin(), itEndNeighKF=vNeighs.end(); itNeighKF!=itEndNeighKF; itNeighKF++) { KeyFrame* pNeighKF = *itNeighKF; if(!pNeighKF->isBad()) { // mnTrackReferenceForFrame防止重复添加局部关键帧 if(pNeighKF->mnTrackReferenceForFrame!=mCurrentFrame.mnId) { mvpLocalKeyFrames.push_back(pNeighKF); pNeighKF->mnTrackReferenceForFrame=mCurrentFrame.mnId; //? 找到一个就直接跳出for循环? break; } } } // 类型3:将一级共视关键帧的子关键帧作为局部关键帧(将邻居的孩子们拉拢入伙) const set<KeyFrame*> spChilds = pKF->GetChilds(); for(set<KeyFrame*>::const_iterator sit=spChilds.begin(), send=spChilds.end(); sit!=send; sit++) { KeyFrame* pChildKF = *sit; if(!pChildKF->isBad()) { if(pChildKF->mnTrackReferenceForFrame!=mCurrentFrame.mnId) { mvpLocalKeyFrames.push_back(pChildKF); pChildKF->mnTrackReferenceForFrame=mCurrentFrame.mnId; //? 找到一个就直接跳出for循环? break; } } } // 类型3:将一级共视关键帧的父关键帧(将邻居的父母们拉拢入伙) KeyFrame* pParent = pKF->GetParent(); if(pParent) { // mnTrackReferenceForFrame防止重复添加局部关键帧 if(pParent->mnTrackReferenceForFrame!=mCurrentFrame.mnId) { mvpLocalKeyFrames.push_back(pParent); pParent->mnTrackReferenceForFrame=mCurrentFrame.mnId; //! 感觉是个bug!如果找到父关键帧会直接跳出整个循环 break; } } } // Step 3:更新当前帧的参考关键帧,与自己共视程度最高的关键帧作为参考关键帧 if(pKFmax) { mpReferenceKF = pKFmax; mCurrentFrame.mpReferenceKF = mpReferenceKF; } }
4.函数解析
4.1 记录共视
我们遍历当前帧的所有地图点mCurrentFrame.mvpMapPoints[i]:
若地图点存在,用临时变量pMP存储该地图点,若该地图点没有被标记为isBad,则我们用一个map<KeyFrame*, size_t>型变量observations存储能观测到该地图点的关键帧及该地图点在关键帧中的索引,我们遍历每一个能看见该地图点的关键帧:
我们维护了一个map<KeyFrame*,int> keyframeCounter变量存储了当前帧和与当前帧有共视地图点的帧的共视程度,比如keyframeCounter[KeyFrame5,10]表示关键帧5和当前帧有的共视地图点为5个。
如下图:我们这步做的是找到所有红色关键帧和当前帧mCurrentFrame的共视地图点的数目并存储在keyframeCounter中。
如果keyframeCounter为空,则表示和当前关键帧有共视程度的关键帧为0,追踪局部地图失败!
4.2 更新局部关键帧(mvpLocalKeyFrames)
添加局部关键帧有3种类型:
1.能观测到当前帧地图点的关键帧作为局部关键帧 (将邻居拉拢入伙)(一级共视关键帧)
这个就是我们如上图所示的红色关键帧,红色关键帧我们存储在了keyframeCounter的第一维中,我们遍历它的第一维,将和当前关键帧有共视的关键帧添加到局部关键帧的列表里,并将该一级共视帧的mnTrackReferenceForFrame标记置为当前帧的ID避免在接下来两步重复添加,并在keyframeCounter中寻找具有最大观测数目的共视关键帧pKFmax和它的得分max。
2.遍历一级共视关键帧,寻找更多的局部关键帧
我们遍历当前关键帧mCurrentFrame的一级关键帧的共视关键帧(和当前关键帧mCurrentFrame有共视的二级关键帧,如上图中绿色帧所示)
如果这个二级共视关键帧没有被添加过(mnTrackReferenceForFrame标记不是mCurrentFrame的ID),则也将这个关键帧添加到局部关键帧mvpLocalKeyFrames中。
3.将一级共视关键帧的子关键帧、父关键帧作为局部关键帧(将邻居的孩子们拉拢入伙、将邻居的父母们拉拢入伙)
这里没有过多的筛选条件,只要这个关键帧没有被添加过就可以。(mnTrackReferenceForFrame标记不是mCurrentFrame的ID)
4.3 更新当前帧的参考关键帧,与自己共视程度最高的关键帧作为参考关键帧
至此,我们的局部地图的关键帧mvpLocalKeyFrames更新完了。
最后,我们将当前帧的参考关键帧mCurrentFrame.mpReferenceKF置为与当前帧共视程度最高的一级关键帧。















 262
262











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











