









可能是本人不太聪明的原因,在看到这个位姿初始化函数内容的时候,我卡了很久,总感觉乱七八糟的,不过看了很多大佬的博客以后再加上多花时间,最后终于对这个函数有了一个粗略的认知,在这里写一下个人理解,有错误望批评指正,谢谢大家。
正文:
首先我们知道,这个函数是在回调函数laserCloudInfoHandler()中的,订阅的是作者自定义的一个cloud_info数据类型的数据,这里面包含了imu的原始数据(cloudInfo.imuRollInit等)和imu里程计信息(cloudInfo.initialGuessX等),我们就通过这些信息来对lidar位姿进行初始化。
在讲这个函数之前,我们首先理解一下这个函数中经常出现的一些变量所代表的含义:1.transformTobeMapped:保存每一帧实时位姿的一个容器(XYZ,RPY)
2.lastImuTransformation:保存imu旋转角,主要用在前两帧
3.lastImuPreTransformation:保存imu里程计,主要用于第三帧数据之后
然后我们再来理清一个事实:第一帧cloud_info数据进来的时候,是没有imu里程计信息的,因为我们可以发现,cloud_info是来源于imageProjection的,而imageProjection的imu里程计信息是来源于imuPreintegration的,但是imuPreintegration想要得到高频的imu里程计信息,是需要来自mapOptmization的低频激光里程计的,绕了一圈又回到了mapOptimzation()中,所以,第一帧cloud_info数据进来的时候,是没有imu里程计信息的。
进入函数updateInitialGuess():
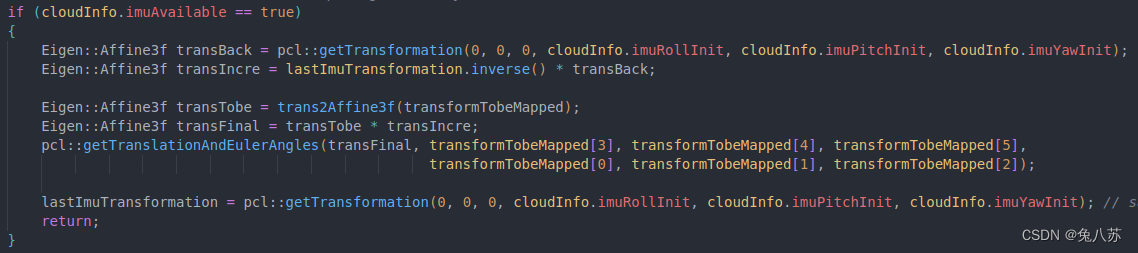
1、第一帧数据进来的时候,关键帧集合为空,就用cloud_info中imu原始数据对transformTobeMapped位姿容器进行初始化,然后用lastImuTransformation保存此时的(第一帧)imu原始旋转角,接着return
2、第二帧数据进来的时候(此时第二帧已经有了imu里程计数据),用transBack保存此时的imu里程计信息,然后将transBack赋值给lastImuPreTransformation(lastImuPreTransformation也保存了imu里程计信息),但是此时其实不管是transBack也好还是lastImuPreTransformation也罢,在第二帧数据传进来的过程中都没有用到(在处理第三帧的时候,它们作为第二帧(第三帧的上一帧)才用到)

跳过else直接看后面:我们用transBack来保存第二帧的imu原始旋转角,还记不记得我们在处理第一帧数据的时候用lastImuTransformation保存第一帧imu原始旋转角,因此我们已知第一帧和第二帧旋转角,就可以得到第一帧到第二帧的旋转增量transIncre,然后将transIncre作用于第一帧的初始位姿transformTobeMapped上,得到第二帧的初始位姿矩阵transFinal,然后通过函数pcl::getTranslationAndEulerAngles提取得到第二帧的初始位姿transformTobeMapped(XYZ,RPY),然后依旧用lastImuTransformation保存第二帧的imu原始旋转角。
3、第三帧数据进来我们用transBack来保存第三帧imu里程计(lastImuPreTransAvailable是一个静态变量,初始被设置为false,之后就变成了true且保持不变)

还记不记得在第二帧数据进来以后,我们用lastImuPreTransformation也保存了第二帧imu里程计信息(不记得的可以回过头去看看),因此第二帧里程计信息和第三帧imu里程计信息我们都知道了,因此我们就可以得到第二帧到第三帧的imu里程计增量transIncre,然后将其作用于第二帧初始位姿transformTobeMapped上,就可以得到第三帧的位姿矩阵transFinal上,通过函数pcl::getTranslationAndEulerAngles提取得到第三帧的初始位姿transformTobeMapped(XYZ,RPY),然后依旧用lastImuTransformation保存第三帧的imu原始旋转角。
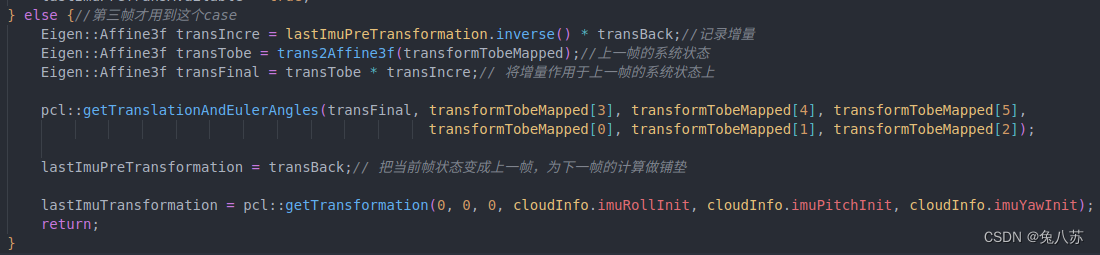
第四帧之后就跟第三帧的步骤是一样的了。















 936
936











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









