







目录
大致过程
gazebo只能加载world模型和urdf模型
所以分为两步
1.要把sdf文件包含在world文件里
2.然后是gazebo要找得到sdf文件
sdf文件包含在world文件
先上一个最简单的包含自己sdf模型的world文件
<!--?xml version="1.4" ?-->
<sdf version="1.6">
<world name="my_world">
<!-- 环境光 -->
<include>
<uri>model://sun</uri>
</include>
<!-- 地面 -->
<include>
<uri>model://ground_plane</uri>
<script>
<uri>file://media/materials/scripts/gazebo.material</uri>
<name>Gazebo/White</name>
</script>
</include>
<!--模型 -->
<model name='model_name'>
<include>
<uri>model://my_model</uri><!--核心-->
</include>
</model>
</world>
</sdf>
my_model就是你的模型文件,这个文件一般包含一个.config文件和一个.sdf文件
设置sdf文件的路径
第二步就是让
<uri>model://my_model</uri>
能被找得到
目前我只知道有两种方法
1.把文件直接放到能被gazebo找得到的目录下
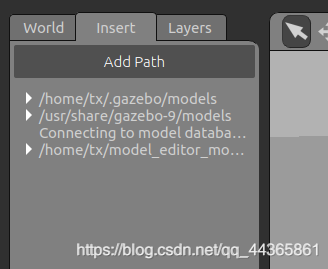
可以先打开gazebo
然后在左上角能找到insert标签
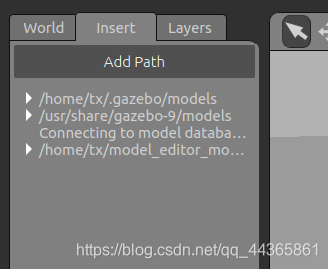
这个标签下的目录都能直接被gazebo找到,所以直接把文件放到这里就行了
2.设置环境变量使gazebo能找到该文件
这种方法就是在~目录下找到.bashrc文件,这个文件是用来存放环境变量的,然后在末尾加上
GAZEBO_MODEL_PATH = 你文件的路径
GAZEBO_MODEL_PATH = 你文件的路径这个不能有空格
3.在package.xml文件添加路径
直接添加代码(注意位置)
<depend>gazebo_ros</depend>
<exec_depend>gazebo</exec_depend>
<export>
<!-- Other tools can request additional information be placed here -->
<gazebo_ros gazebo_media_path="${prefix}"/>
<gazebo_ros gazebo_model_path="${prefix}/models"/>
</export>
但运行时有时会报错说gazebo_ros重复添加,那就可以把上面几句删掉,如下
直接在<export>标签下添加
<gazebo_ros gazebo_media_path="${prefix}"/>
<gazebo_ros gazebo_model_path="${prefix}/models"/>
参考文献
https://blog.csdn.net/yuguo0_331/article/details/89205163
https://blog.csdn.net/ktigerhero3/article/details/98712486
https://blog.csdn.net/yxh505613923/article/details/106961476/
https://zhuanlan.zhihu.com/p/129660662
留有疑问
- 方法1的那些目录是怎么让gazebo能找到文件的,我猜测gazebo里应该有一个文件专门存放这些目录,然后这个文件的性质是不是和.bashrc的性质是一样的,能够设置gazebo自己的(局部环境变量)
2.不管是第一种还是第二种方法,在可移植方面都太差了,比如你写的源码别人下载了还不能直接用,还要配置这些文件。有没有更简单的方法

















 1606
1606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









