






由于ompl的cmakelist文件中本身是没有连接到ros的库,所以我们需要手动连接ros的库,这就需要在ompl的cmakelist文件中添加,添加过程如下所示:
1、在第一级ompl目录下的CMakeLists.txt中添加(如图所示):
find_package(roscpp REQUIRED)
include_directories(SYSTEM ${roscpp_INCLUDE_DIRS})
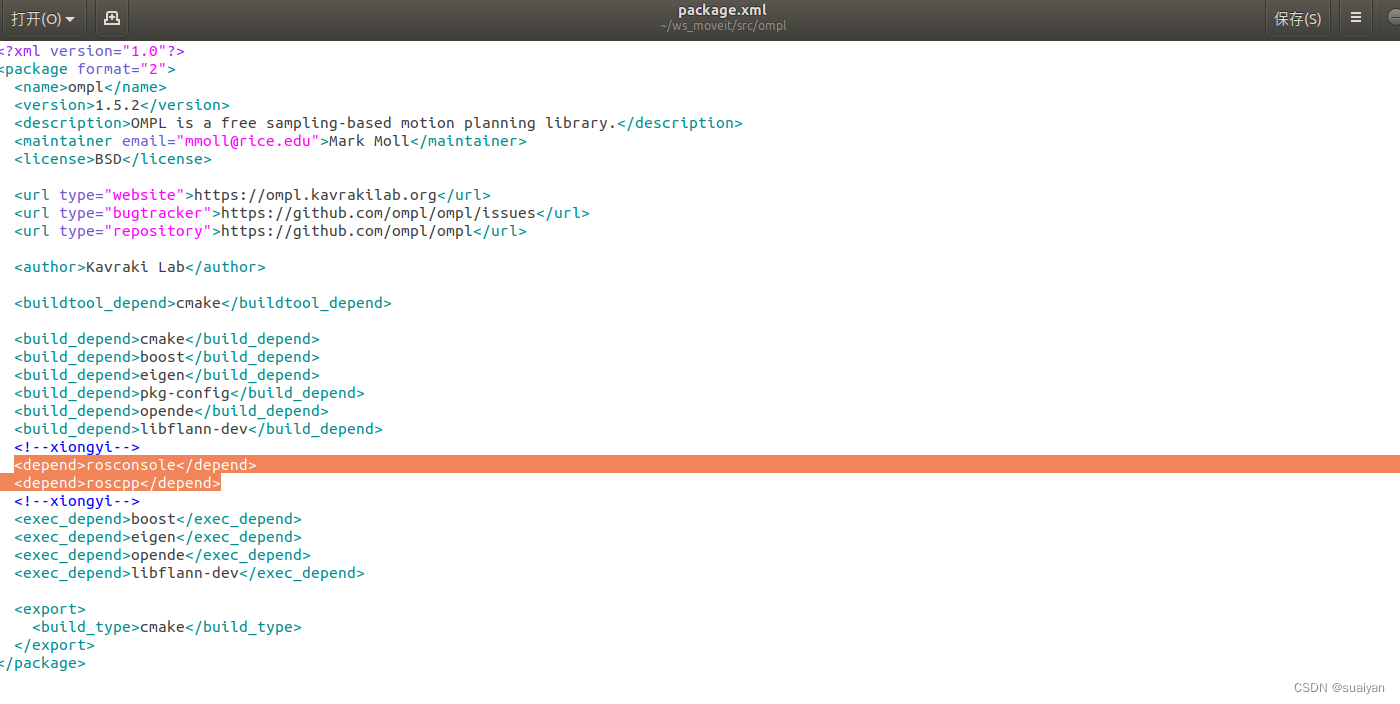
 2、在第一级ompl目录下的package.xml中添加(如图所示):
2、在第一级ompl目录下的package.xml中添加(如图所示):
<depend>rosconsole</depend>
<depend>roscpp</depend>
3、在ompl/src/ompl这一级的目录下的CMakeLists.txt中添加:
target_link_libraries(ompl
${roscpp_LIBRARIES})
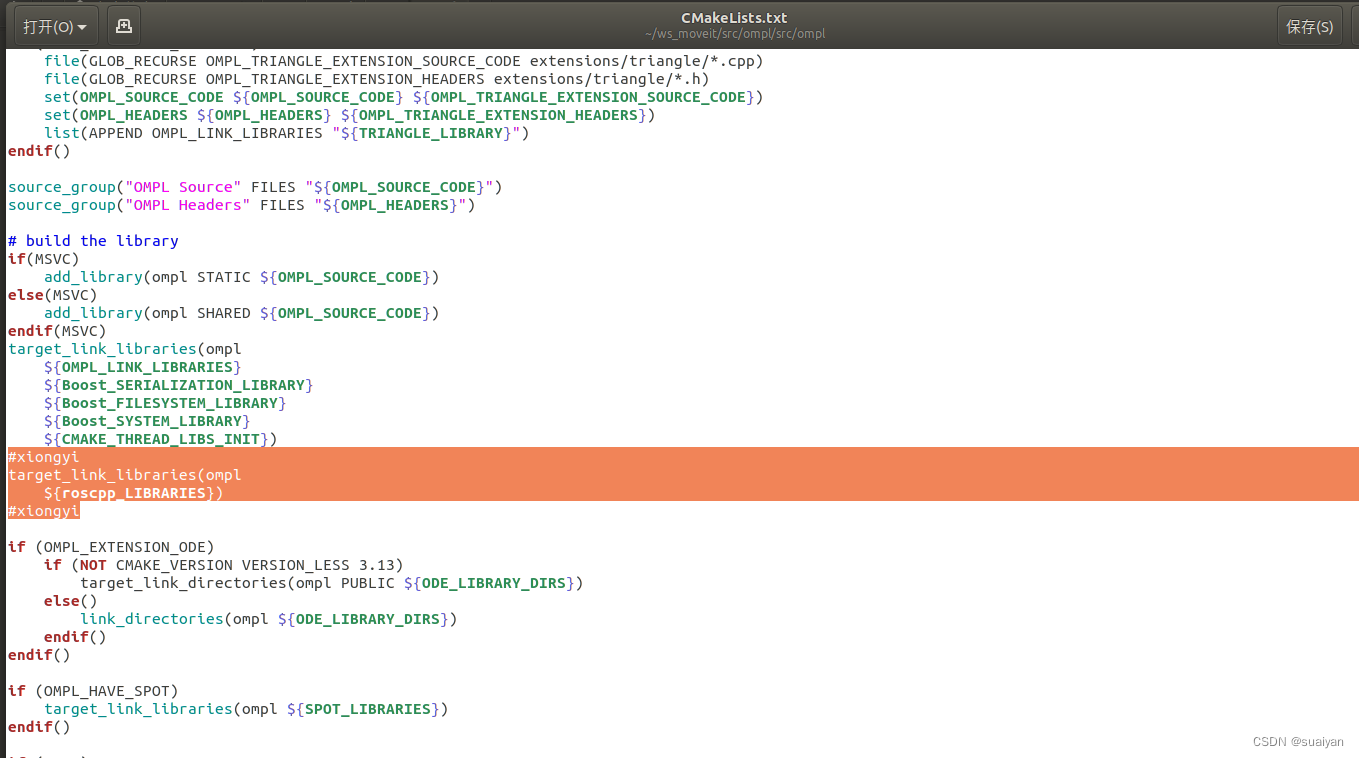
添加成功后即可正常编译。















 166
166











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









