






 本文详细介绍了雅可比矩阵的计算方法,基于《机器人建模和控制》一书中的DH参数表,通过示例展示了如何处理连杆系统中角度的变化,特别是如何利用三角函数简化计算过程。
本文详细介绍了雅可比矩阵的计算方法,基于《机器人建模和控制》一书中的DH参数表,通过示例展示了如何处理连杆系统中角度的变化,特别是如何利用三角函数简化计算过程。
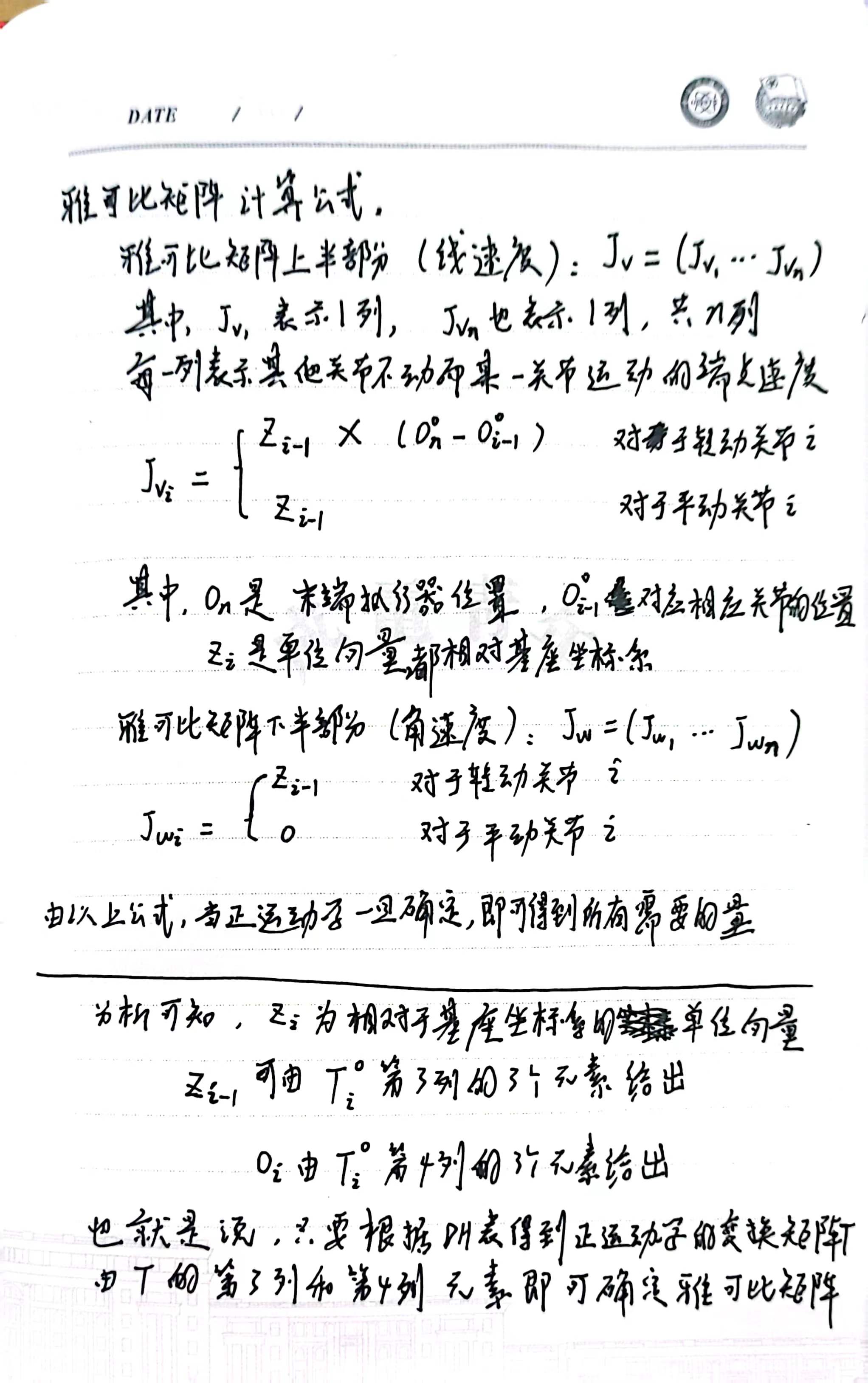
雅可比矩阵的计算
本文整理自《机器人建模和控制》,机械工业出版社出版
-
计算公式说明
-
使用举例

连杆 a i a_i ai α i \alpha_i αi d i d_i di θ i \theta_i θi 1 α 1 \alpha_1 α1 0 0 θ 1 ∗ \theta_1^* θ1∗ 2 α 2 \alpha_2 α2 0 0 θ 2 ∗ \theta_2^* θ2∗ 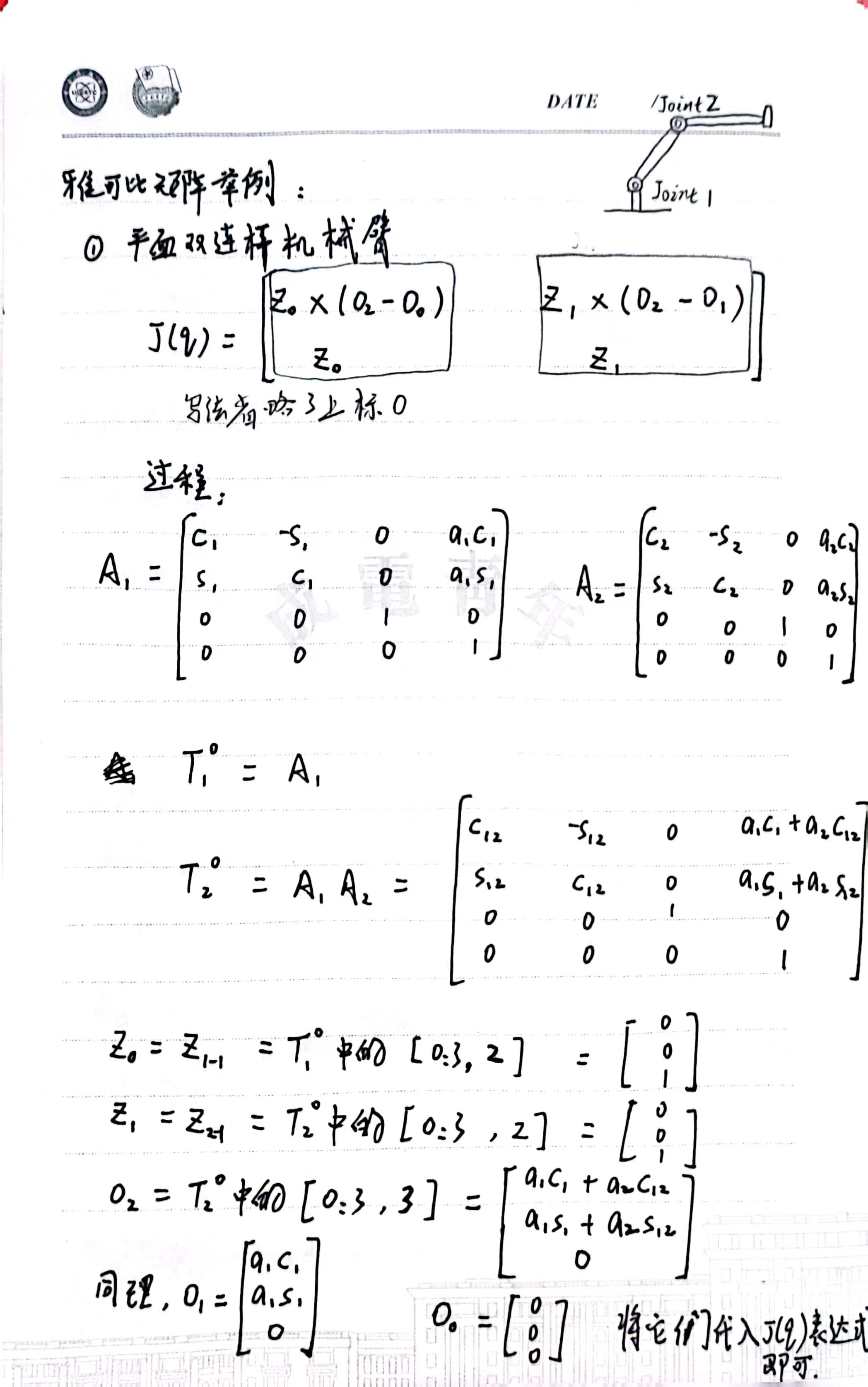
在DH表中,唯一变化的是 θ \theta θ,所以,我们将 c o s θ i cos{\theta_i} cosθi写为 c i c_i ci,
将 θ 1 + θ 2 \theta_1 + \theta_2 θ1+θ2写为 θ 12 \theta_{12} θ12,因此, c o s ( θ 1 + θ 2 ) cos({\theta_1 + \theta_2}) cos(θ1+θ2)表示为 c 12 c_{12} c12
s i n θ sin{\theta} sinθ同理

















 1634
1634

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









