







 本文详细对比了标准DH和修正DH参数下雅克比矩阵的公式和差异,通过实例分析展示了两种方法如何求解雅克比矩阵,并证明尽管方法不同,但最终结果是相同的。
本文详细对比了标准DH和修正DH参数下雅克比矩阵的公式和差异,通过实例分析展示了两种方法如何求解雅克比矩阵,并证明尽管方法不同,但最终结果是相同的。
一、两种雅克比矩阵的公式及差异说明:
在前面的文章(7)中我们介绍了雅克比矩阵,并给出了标准DH(standard DH)参数下的雅克比矩阵的矢量积公式;这篇文章里我们也给出修正DH(modified DH)参数下的雅克比矩阵公式。对于矢量积方法也有称之为构造法的(这篇文章可以参考下:机器人雅可比矩阵的求法_构造法_飘零过客的博客-CSDN博客_机器人雅克比矩阵计算),后置法就是标准DH参数下的,前置法就是修正DH参数下的
标准DH参数下的雅克比矩阵公式(后置法):
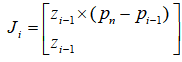
这里是齐次矩阵
的第三列的前三行,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 952
952

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









