






使用 MATLAB 实现对 EuRoC 和 TUM 数据集的轨迹评估
# 不会使用EVO评估工具的看过来↓↓↓
在计算机视觉和机器人领域,轨迹评估是一个关键环节,用于衡量 SLAM(Simultaneous Localization and Mapping,同时定位与建图)算法的性能。传统的工具如 EVO(Evaluation of Visual Odometry and SLAM)提供了强大的功能,但有时我们可能需要一个更灵活的解决方案。本文将介绍如何使用 MATLAB 实现对 EuRoC 和 TUM 数据集的轨迹评估,特别是针对 ORB-SLAM3 和 VINS-MONO 等算法。
先展示效果图再讲解代码:
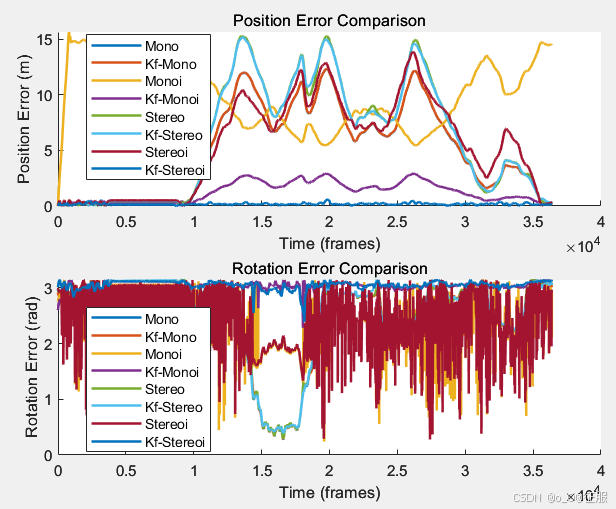
①位置误差和旋转误差可视化:
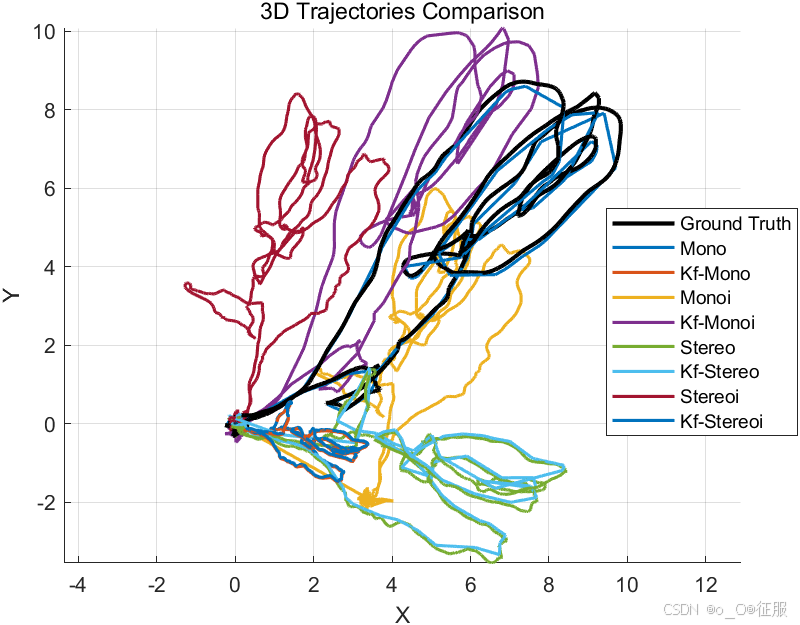
②位置轨迹可视化(3D/2D):
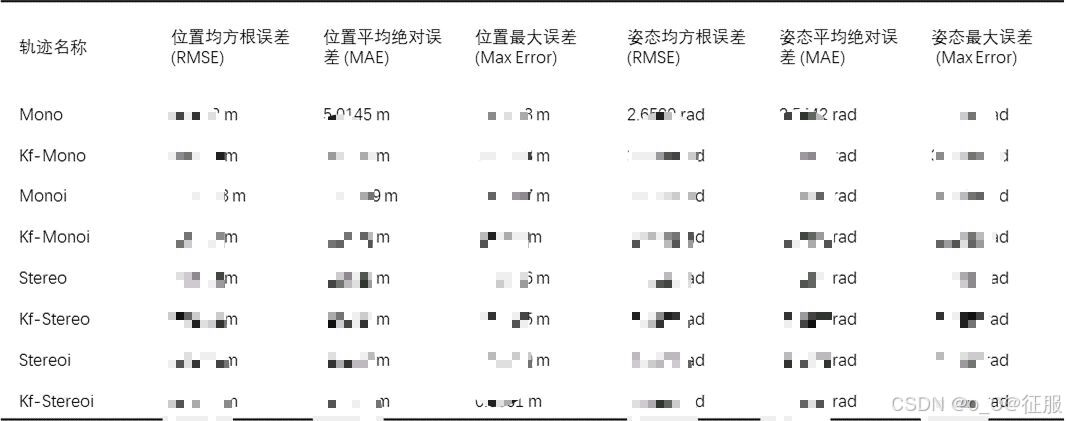
③量化误差表:
1. 引言
EuRoC 数据集和 TUM 数据集是 SLAM 算法评估中最常用的基准数据集之一。EuRoC 数据集提供了丰富的视觉和惯性数据,而 TUM 数据集则专注于室内环境的 RGB-D 数据。评估这些数据集时,我们通常需要计算轨迹的绝对位置误差(APE)和绝对旋转误差(ARE),并绘制轨迹对比图和误差曲线。
在本文中,我们将使用 MATLAB 实现一个完整的轨迹评估流程,包括:
- 数据加载和预处理。
- 时间戳对齐。
- 轨迹标准化。
- 误差计算。
- 结果可视化。
2. MATLAB 实现
以下是完整的 MATLAB 实现代码,涵盖了从数据加载到结果可视化的所有步骤。
2.1 数据加载和预处理
我们首先定义文件路径和轨迹名称,并加载真实轨迹数据。真实轨迹数据通常存储在 CSV 文件中,包含时间戳和位置信息。
function testerror4()
% 文件路径和轨迹名称
trajectory_names = {'Mono', 'Kf-Mono', 'Monoi', 'Kf-Monoi', ...
'Stereo', 'Kf-Stereo', 'Stereoi', 'Kf-Stereoi'};
file_list = {'f_dataset-MH01_mono.txt', 'kf_dataset-MH01_mono.txt', ...
'f_dataset-MH01_monoi.txt', 'kf_dataset-MH01_monoi.txt', ...
'f_dataset-MH01_stereo.txt', 'kf_dataset-MH01_stereo.txt', ...
'f_dataset-MH01_stereoi.txt', 'kf_dataset-MH01_stereoi.txt'};
groundtruth_file = 'groundtruth.csv';
% 读取真实轨迹并进行初始化处理
opts = detectImportOptions(groundtruth_file);
opts.VariableNamingRule = 'preserve'; % 保留原始列标题
groundtruth = readtable(groundtruth_file, opts);
% 提取时间戳和位置数据
gt_timestamps = table2array(groundtruth(:, 1)); % 假设时间戳在第1列
gt_positions = table2array(groundtruth(:, 2:4)); % 假设位置数据在第2-4列
% 提取四元数数据(如果存在)
if size(groundtruth, 2) >= 8
gt_rotations = table2array(groundtruth(:, 5:8)); % 假设四元数数据在第5-8列
else
warning('Ground truth data does not contain quaternion information. Using default quaternions.');
gt_rotations = repmat([1, 0, 0, 0], size(gt_positions, 1), 1); % 默认单位四元数
end
% 标准化真实轨迹
gt_positions = normalize_trajectory(gt_positions);
% 绕 z 轴旋转 45°
angle = -81; % 旋转角度
R = [cosd(angle) -sind(angle) 0;
sind(angle) cosd(angle) 0;
0 0 1]; % 旋转矩阵
% 对真实轨迹进行旋转
gt_positions = (R * gt_positions')'; % 转置操作确保矩阵维度匹配
end
2.2 时间戳对齐
为了确保真实轨迹和估计轨迹的时间戳一致,我们需要对齐时间戳。这里我们使用线性插值来对齐轨迹。
function [aligned_positions, aligned_rotations] = align_with_gt(positions, rotations, timestamps, gt_timestamps)
% 检查时间戳范围是否匹配
if timestamps(1) > gt_timestamps(end) || timestamps(end) < gt_timestamps(1)
warning('Timestamp ranges do not overlap. Alignment may fail.');
end
% 插值对齐
aligned_positions = interp1(timestamps, positions, gt_timestamps, 'linear', 'extrap');
aligned_rotations = interp1(timestamps, rotations, gt_timestamps, 'linear', 'extrap');
end
2.3 误差计算
我们计算位置误差和旋转误差,并评估多种误差指标(如 RMSE、MAE 和最大误差)。
function [position_error, rotation_error] = compute_errors(positions, rotations, gt_positions, gt_rotations)
% 确保 positions 和 groundtruth 的行数相同
n_positions = size(positions, 1);
n_groundtruth = size(gt_positions, 1);
% 如果行数不一致,裁剪长的,或者填充短的(这里我们选择裁剪)
min_length = min(n_positions, n_groundtruth);
positions = positions(1:min_length, :);
gt_positions = gt_positions(1:min_length, :);
rotations = rotations(1:min_length, :);
gt_rotations = gt_rotations(1:min_length, :);
% 位置误差
position_error = sqrt(sum((positions - gt_positions).^2, 2));
% 姿态误差:计算旋转误差,使用四元数
rotation_error = zeros(size(rotations, 1), 1);
for i = 1:size(rotations, 1)
q_pred = rotations(i, :); % 预测的旋转四元数
q_gt = gt_rotations(i, :); % 真实轨迹的旋转四元数
rotation_error(i) = quaternion_angle_difference(q_pred, q_gt);
end
end
2.4 结果可视化
我们绘制三维轨迹对比图和误差曲线,以便直观地比较不同轨迹的性能。
function plot_3d_trajectory(all_positions, gt_positions, trajectory_names)
figure;
hold on;
colors = lines(length(all_positions));
% 绘制真实轨迹
plot3(gt_positions(:,1), gt_positions(:,2), gt_positions(:,3), 'k-', 'LineWidth', 2);
% 绘制估计轨迹
for i = 1:length(all_positions)
positions = all_positions{i};
plot3(positions(:,1), positions(:,2), positions(:,3), '-', 'Color', colors(i, :), 'LineWidth', 1.5);
end
legend(['Ground Truth', trajectory_names]);
xlabel('X');
ylabel('Y');
zlabel('Z');
title('3D Trajectories Comparison');
grid on;
axis equal;
hold off;
end
2.5 导出对齐后的数据
对齐后的数据可以保存到指定文件夹中,方便后续分析。
function export_aligned_data(timestamps, positions, rotations, filename)
aligned_data = [timestamps, positions, rotations];
output_dir = 'F:\桌面\毕业论文\代码\对齐后'; % 指定保存目录
output_filename = fullfile(output_dir, [filename(1:end-4), '_aligned.txt']);
% 检查是否存在 NaN 值
if any(isnan(aligned_data(:)))
warning('NaN values detected in aligned data. Saving file with NaN values.');
end
writematrix(aligned_data, output_filename);
fprintf('Aligned data saved to: %s\n', output_filename);
end
3. 测试与结果
运行上述代码后,你将得到以下结果:
- 对齐后的轨迹数据:保存到指定文件夹中。
- 三维轨迹对比图:直观展示真实轨迹和估计轨迹的差异。
- 误差曲线图:展示位置误差和旋转误差的变化。
- 误差评估指标:包括 RMSE、MAE 和最大误差等。
4. 总结
本文介绍了一个完整的 MATLAB 实现,用于评估 EuRoC 和 TUM 数据集上的 SLAM 算法性能。通过时间戳对齐、轨迹标准化、误差计算和结果可视化,我们可以全面评估 ORB-SLAM3 和 VINS-MONO 等算法的性能。这种方法不仅灵活,而且可以轻松扩展到其他数据集和算法。
希望本文对你有所帮助!如果你有任何问题或建议,请随时留言交流


















 4271
4271

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









