







ROS2在工作空间单独编译某个功能包时,报错显示找不到那个功能包。
WARNING:colcon.colcon_core.package_selection:ignoring unknown package ‘wheeltec_robot_nav2’ in --packages-select
当进入这个功能包里编译却又正常。修改了很多地方都没用,在大佬的指点下解决了问题。

根据报错信息可以看到Finished <<< wheeltec_nav2 [1.88s] ,说明在ROS里识别到的是wheeltec_nav2这个包,所以有可能是在某个文件里包的名字错了,所以打开CMakeLists.txt和package.xml文件可以看到。

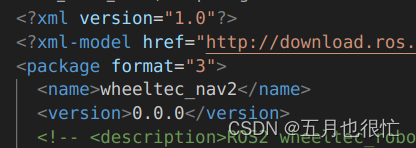
这两处都是wheeltec_nav2,把这两处改为功能包的名字wheeltec_tobot_nav2,然后在wheeltec_ros2下单独编译。

编译成功,问题解决。















 154
154
07-11
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









