







 文章讲述了在处理大型点云文件时,二进制格式显著优于ASCII码格式,因为二进制无需转换且节省存储空间,但ASCII码便于查看点云属性。作者通过实际测试和原因分析,强调了在性能需求高的项目中选择合适的数据格式的重要性。
文章讲述了在处理大型点云文件时,二进制格式显著优于ASCII码格式,因为二进制无需转换且节省存储空间,但ASCII码便于查看点云属性。作者通过实际测试和原因分析,强调了在性能需求高的项目中选择合适的数据格式的重要性。
首先说明一点:Binary(二进制)格式点云文件进行读取时要比Ascll码格式点云读取时要快的多,尤其是对于大型的点云文件,如几百万、甚至几千万个点云的情况下。
今天遇到了一种情况,在写项目的时候进行点云读取,读取的时候只有90多万个点,读取却要1分钟左右,所以项目的进行就涉及到了性能的问题,为什么读取的这么慢呢?晚上单独把读取点云文件的代码拎了出来。然后加载了一个七十万的点云文件,令我震惊的是1s中左右就读取完毕了。
分析:第一就是我的点云路径问题。第二就是我的文件问题。针对这两点,我就分别打开这两个文件看了一下,发现1s中读完的那个点云,是用二进制进行保存的,而另一个使用ascll码进行保存的。
下面我就针对同一个文件数据分别进行了两种格式的保存,点数为6124679个点,使用ASCLL码保存的,读取时间大概为:
9分钟!!!(很长)
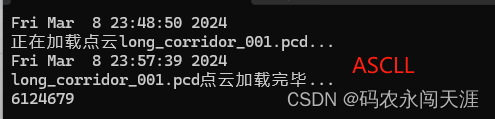
而二进制格式保存的读取时间大概为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 95
95

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











