






1.查看自己ros版本以及rplidar安装
打开终端输入,这个roscore也是非常重要的,以后只要用到ros都建议首先使用roscore然后再打开其他终端操作其他的东西:
$ roscore再打开新终端输入:
$ rosparam list
最后在第二个终端再输入可以得到ros的版本号:
$ rosparam get /rosdistro
得到版本号之后,安装对应ros版本的rplidar,也是在第二个终端:
$ sudo apt-get install ros-noetic-rplidar-ros 2.RPLIDAR驱动下载
首先要有自己的工作空间,如果已经创有工作空间的话就少了创建的步骤,没有的话那就创建一个工作空间:
代码中注意复制的是$后面的,把前面的放出来是为了方便知道路径
(base) hjb@jl16k:~$ cd catkin_ws
(base) hjb@jl16k:~/catkin_ws$ mkdir src再在catkin_ws目录下初始化一下,上一步所在目录是src,通过cd ..返回到catkin_ws目录:
$ catkin_init_workspace如果这一步出现找不到python3这种问题,报错我忘记截图了,使用以下方法解决,通过在后面指定python3:
$ catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3 激光雷达rplidar一代驱动安装,首先要先进入src,再克隆功能包到src下:
$ cd src
$ git clone https://github.com/ncnynl/rplidar_ros.git返回到catkin目录下编译,在catkin_ws目录下生存devel和build目录,生成完之后再使用指令生成install目录:
$ cd ..
$ catkin_make
$ catkin_make install最后让环境变量生效:
$ source devel/setup.bash工作空间创建和驱动安装以及完成
3.将雷达与电脑通过USB连接
此步就不用多说了,就口插到电脑就可
4.雷达使用电脑获取数据
先要检查rplidar串口权限,使用官方的操作:
$ ls -l /dev |grep ttyUSB再添加write权限:
sudo chmod 666 /dev/ttyUSB0图中我尝试了两种方法,其实只要按照上面的来即可
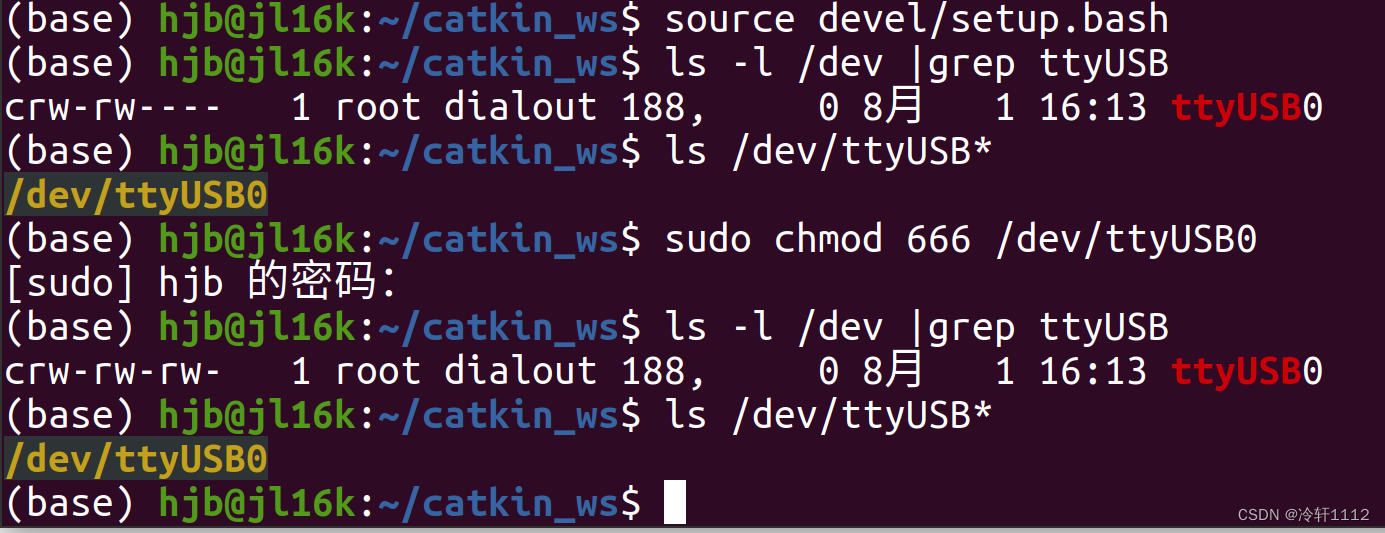
值得注意的是,每次拔掉雷达的USB后,再插入使用时,必须要用以下操作,不然会报错:
(base) hjb@jl16k:~/catkin_ws$ source devel/setup.bash
(base) hjb@jl16k:~/catkin_ws$ ls -l /dev |grep ttyUSB
(base) hjb@jl16k:~/catkin_ws$ sudo chmod 666 /dev/ttyUSB0
使用就是,特别注意上一条说的,在使用这条命令之前要执行上面说的三条命令:
(base) hjb@jl16k:~/catkin_ws$ roslaunch rplidar_ros view_rplidar.launch
5.查看雷达话题
一般雷达的话题是/scan,注意这个命令是再新的终端下,第四步的终端不要停止:
(base) hjb@jl16k:~/catkin_ws$ rostopic list
 查看frame_id,命令中echo后面接的是激光雷达的话题,如果话题名不是这个记得更改
查看frame_id,命令中echo后面接的是激光雷达的话题,如果话题名不是这个记得更改
(base) hjb@jl16k:~/catkin_ws$ rostopic echo /scan | grep frame_id














 5360
5360











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









