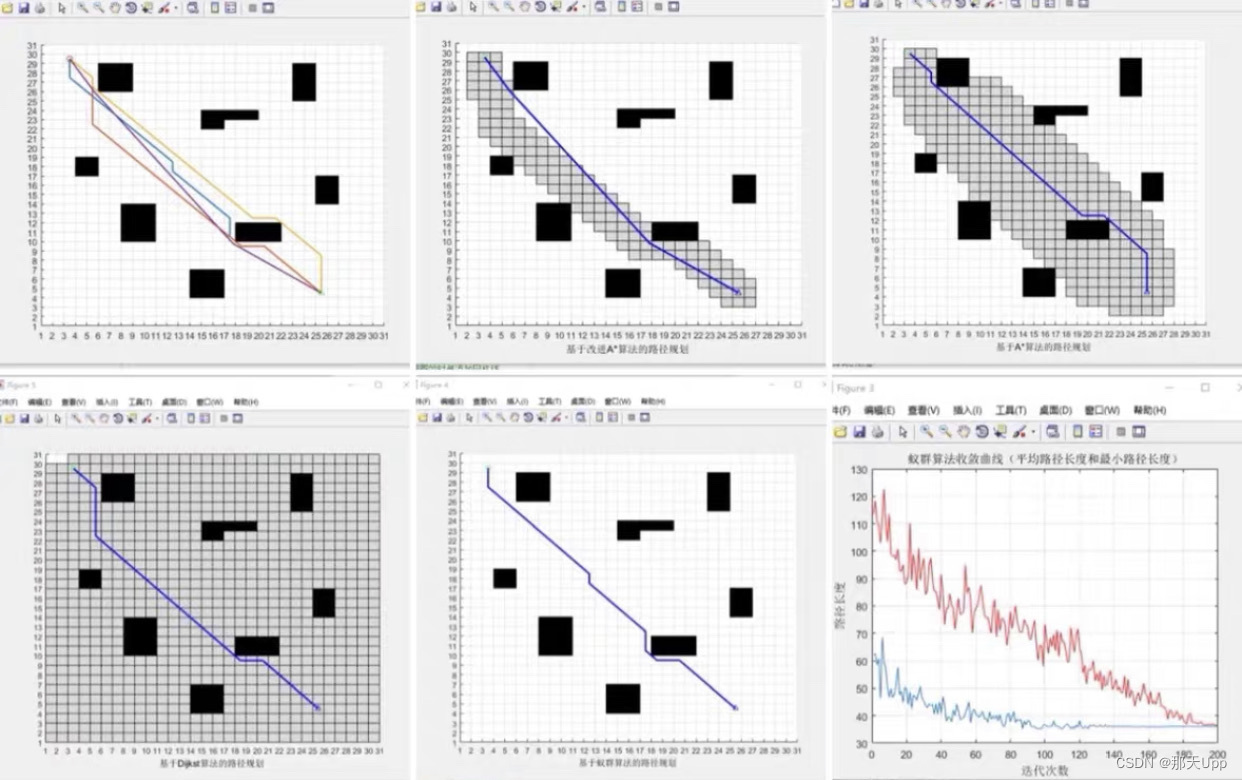
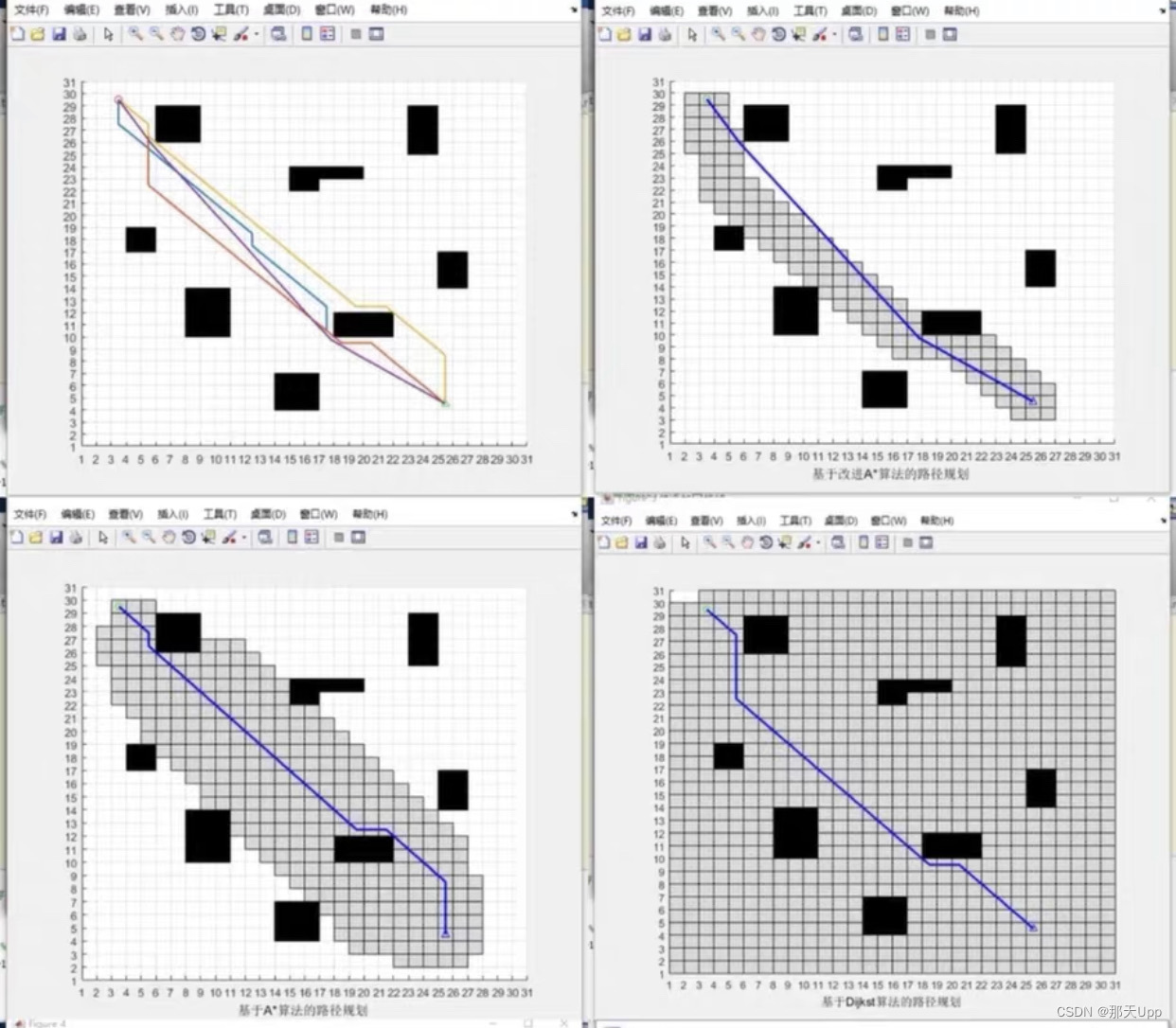
以下是一个简单的A*算法路径规划的MATLAB示例代码:
```matlab
function [path, cost] = astar(start, goal, map)
% A*算法路径规划
% start: 起点坐标 [x,y]
% goal: 终点坐标 [x,y]
% map: 地图,1为可通过,0为障碍物
% path: 路径坐标 [x1,y1;x2,y2;...]
% cost: 路径总代价
% 地图尺寸
[nrows, ncols] = size(map);
% 节点代价
g = Inf(nrows, ncols);
% 节点启发式代价
h = heuristic(start, goal);
% 节点总代价
f = g + h;
% 节点父节点坐标
parent = zeros(nrows, ncols, 2);
% 起点代价
g(start(1), start(2)) = 0;
% 待扩展节点列表
open_list = [start, f(start(1), start(2))];
% 已扩展节点列表
closed_list = [];
% 扩展节点
while ~isempty(open_list)
% 选择最小代价节点
[~, idx] = min(open_list(:, 3));
curr = open_list(idx, 1:2);
% 到达终点
if isequal(curr, goal)
path = reconstruct_path(parent, start, goal);
cost = g(goal(1), goal(2));
return;
end
% 从待扩展列表中移除
open_list(idx, :) = [];
% 添加到已扩展列表
closed_list = [closed_list; curr];
% 扩展邻居
[x, y] = meshgrid(curr(1)-1:curr(1)+1, curr(2)-1:curr(2)+1);
neighbors = [x(:), y(:)];
neighbors = neighbors(neighbors(:,1) > 0 & neighbors(:,1) <= nrows & ...
neighbors(:,2) > 0 & neighbors(:,2) <= ncols & ...
~ismember(neighbors, closed_list, 'rows') & ...
map(sub2ind([nrows, ncols], neighbors(:,1), neighbors(:,2))) == 1, :);
for i = 1:size(neighbors, 1)
neighbor = neighbors(i, :);
% 计算邻居代价
tentative_g = g(curr(1), curr(2)) + distance(curr, neighbor);
% 更新邻居代价
if tentative_g < g(neighbor(1), neighbor(2))
parent(neighbor(1), neighbor(2), :) = curr;
g(neighbor(1), neighbor(2)) = tentative_g;
h(neighbor(1), neighbor(2)) = heuristic(neighbor, goal);
f(neighbor(1), neighbor(2)) = g(neighbor(1), neighbor(2)) + h(neighbor(1), neighbor(2));
% 添加到待扩展列表
if ~any(ismember(open_list(:, 1:2), neighbor, 'rows'))
open_list = [open_list; neighbor, f(neighbor(1), neighbor(2))];
end
end
end
end
% 找不到路径
path = [];
cost = Inf;
end
function d = distance(a, b)
% 计算两点距离
d = norm(a - b, 2);
end
function h = heuristic(a, b)
% 启发式函数,使用曼哈顿距离
h = abs(a(1) - b(1)) + abs(a(2) - b(2));
end
function path = reconstruct_path(parent, start, goal)
% 重构路径
path = [goal];
while ~isequal(path(1,:), start)
path = [parent(path(1,1), path(1,2), :); path];
end
path = reshape(path, [], 2);
end
```
使用示例:
```matlab
% 定义地图
map = [1 1 1 1 0 1 1 1 1 1;
1 0 1 1 1 1 0 1 1 1;
1 0 1 1 1 1 0 1 1 1;
1 0 1 1 1 1 0 1 1 1;
1 0 1 1 1 1 0 1 1 1;
1 0 1 1 1 1 0 1 1 1;
1 1 1 1 1 1 0 1 1 1;
1 1 1 1 1 1 0 1 1 1;
1 1 1 1 1 1 0 1 1 1;
1 1 1 1 1 1 0 1 1 1];
% 路径规划
start = [1, 1];
goal = [10, 10];
[path, cost] = astar(start, goal, map);
% 显示结果
figure;
imagesc(map);
hold on;
plot(start(2), start(1), 'go', 'MarkerSize', 10, 'LineWidth', 2);
plot(goal(2), goal(1), 'ro', 'MarkerSize', 10, 'LineWidth', 2);
plot(path(:,2), path(:,1), 'b', 'LineWidth', 2);
axis equal;
axis tight;
grid on;
title(sprintf('Path cost: %.2f', cost));
```
该示例代码中使用了曼哈顿距离作为启发式函数,可以根据实际情况进行修改。








 2667
2667











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























