






启动深度相机节点时出现以下问题:
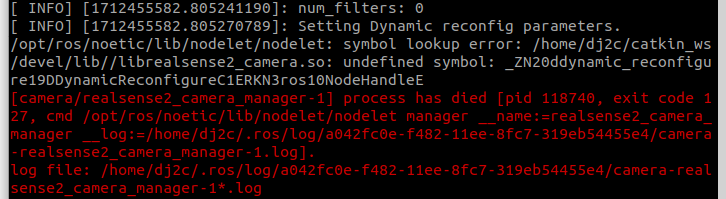
初步调研可能的原因:
ddynamic_reconfigure没有安装或者重复安装
1、 查看已安装版本:
find / -name "libddynamic_reconfigure*.so" 2>/dev/null
如图找到了两个可执行文件,
解决方法:
1、删除其中一个不需要的,一个是自己编译安装的,一个是通过apt安装的
2、在~/.bashrc中添加export LD_LIBRARY_PATH=/opt/ros/noetic/lib:$LD_LIBRARY_PATH,指定优先使用系统的版本;
我尝试了第二种方法:
sudo gedit ~/.bashrc然后在打开的文件末尾添加以下设置:
export LD_LIBRARY_PATH=/opt/ros/noetic/lib:$LD_LIBRARY_PATH不过我在完成以下设置之后,source后启动深度相机,出现以下警告信息,不清楚是否因为这个修改方式是错误的,应该不是,因为提示的警告信息是usb的相关功能,可能是电源供给不足之类的问题,如果有相同的问题,或者解决了警告问题,欢迎评论区讨论哦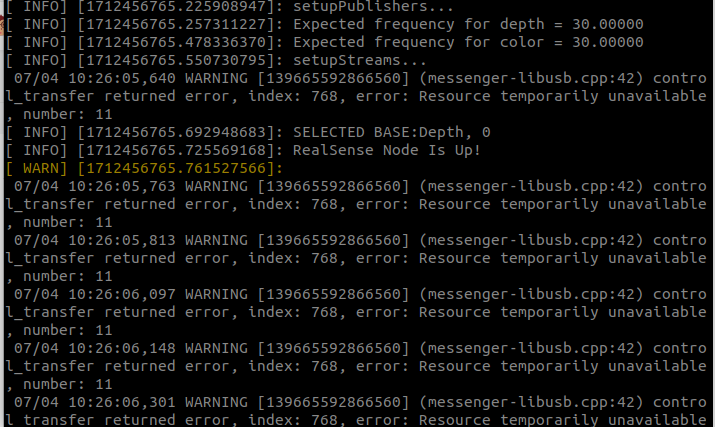















 83
83











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









