






ROS::ubuntu18.04 melodic
MATLAB:windows10 matlaba2021
ROS的IP:172.20.10.3(在终端输入ifconfig可查看)
MATLAB的IP:172.20.10.11(在终端输入ipconfig可查看)
1、在ROS端配置
vim .bashrc
在该文件中添加
export ROS_IP=172.20.10.3 #绑定linux主机IP
export ROS_MASTER_URI=http://172.20.10.3:11311 #设置ROS_MASTER在哪个IP上运行
export ROS_HOSTNAME=172.20.10.3 #设置本地主机IP添加完成后退出该文件,在终端输入
source .bashrc #使刚才修改的环境变量文件生效
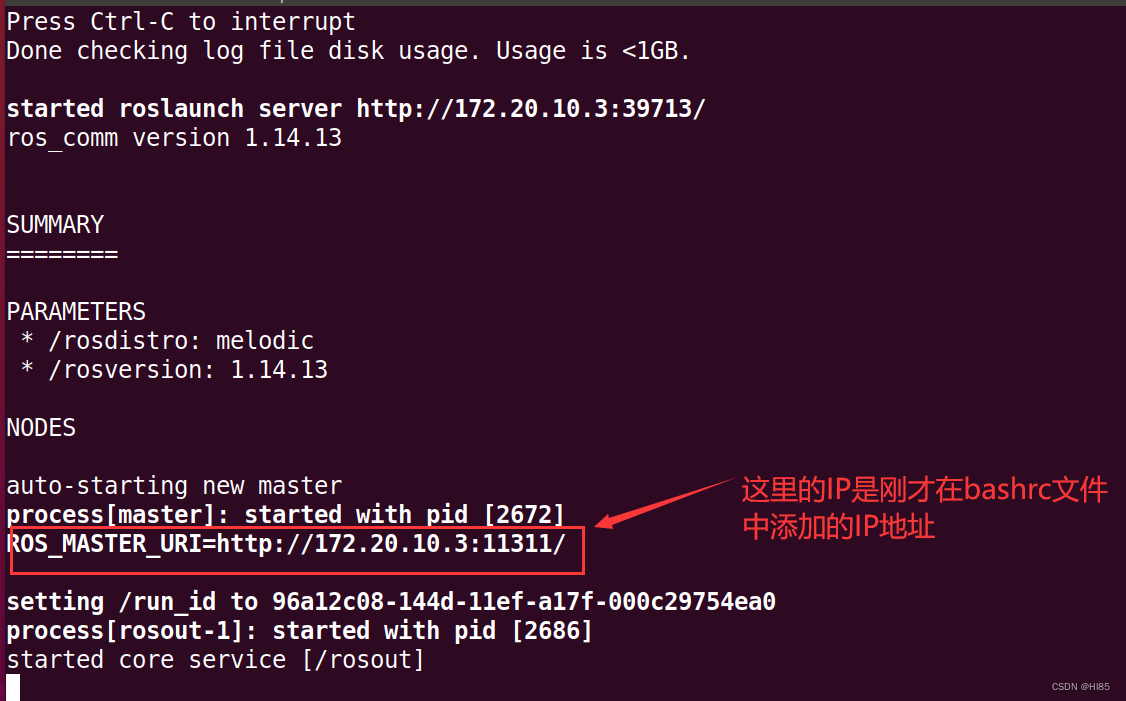
roscore #环境变量文件生效后启动ROS_MASTER启动roscore后终端显示这个ROS_MASTER_URI地址,其中的IP应该与之前bashrc文件中自己添加的地址一致
2、在MATLAB中,新建,m文件,写入以下代码后并运行
setenv('ROS_MASTER_URI','http://172.20.10.3:11311/') #设置环境变量,这里的URL与ROS终端的URL一致
rosinit #进行ROS初始化连接在终端提示以下内容则代表连接成功
The value of the ROS_MASTER_URI environment variable, http://172.20.10.3:11311/, will be used to connect to the ROS master.
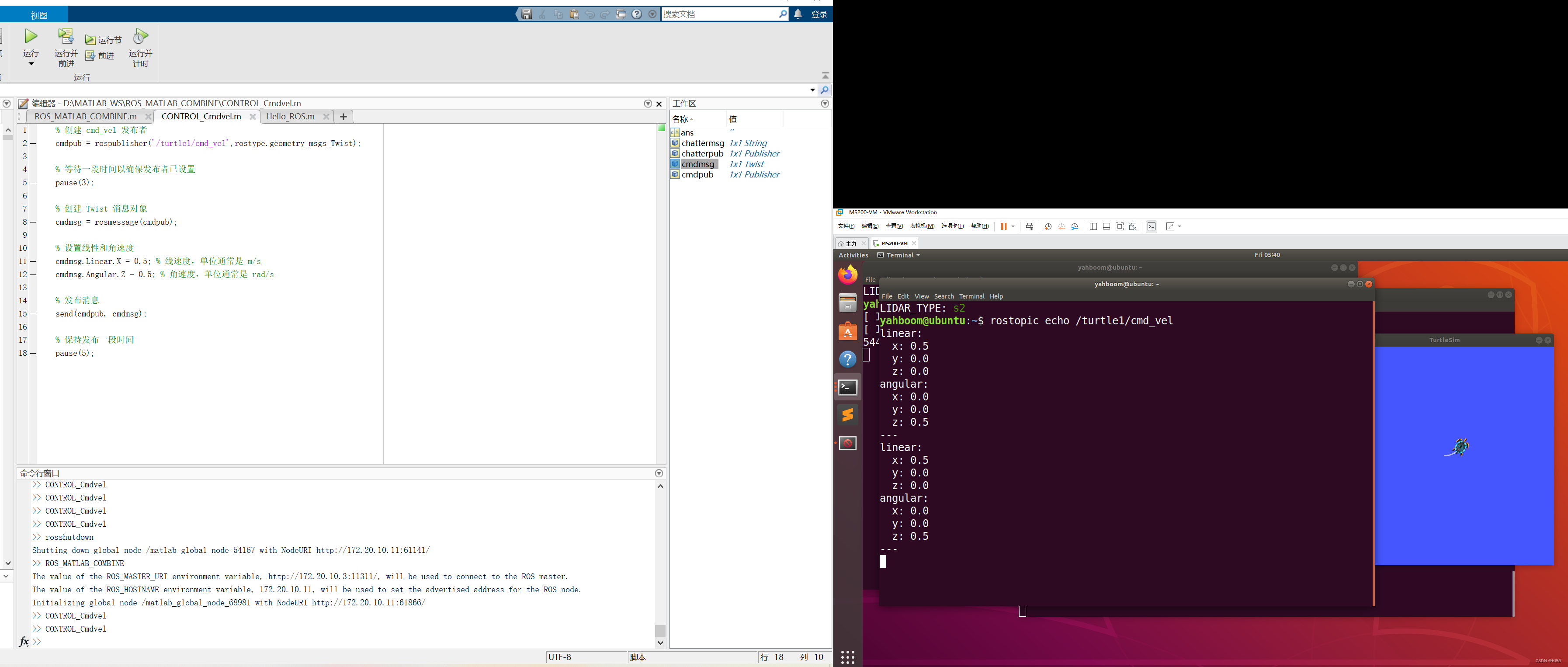
Initializing global node /matlab_global_node_18747 with NodeURI http://172.20.10.11:59402/这里给出一个示例,建立一个节点并控制小乌龟运动
% 创建 cmd_vel 发布者
cmdpub = rospublisher('/turtle1/cmd_vel',rostype.geometry_msgs_Twist);
% 创建 Twist 消息对象
cmdmsg = rosmessage(cmdpub);
% 设置线性和角速度
cmdmsg.Linear.X = 5; % 线速度,单位通常是 m/s
cmdmsg.Angular.Z = 5; % 角速度,单位通常是 rad/s
% 发布消息
send(cmdpub, cmdmsg);
% 保持发布一段时间
pause(5);可以看到小乌龟按照发布的线速度和角速度进行移动
至此ROS与MATLAB的通信完成。
注:
一、若MATLAB中话题发布后在ROS端用rostopic list能查看到发布的话题,但是使用rostopic echo /topic_name 发现没有任何数据,检查Windows与linux之间是否互相ping的通。一般情况下是Windows可以ping通linux,linux不能ping通Windows,这个时候打开Windows控制面板,搜索防火墙,把防火墙关闭,再次尝试即可。
二、如果解决了(一)中互相ping但仍然通信不上的时候,检查ROS与MATLAB之间的IP环境变量设否设置正确。















 1306
1306











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









