







今日开始学习FOC无刷电机的驱动:
主控芯片:STM32F407VET6 开发学习板:嘉立创的立创梁山派天空星
2804云台电机; AS5600编码器
目录
FOC无刷电机基础知识:
基本知识:
以下为AI生成答案:
FOC无刷电机的基础知识主要包括以下几个方面:
- FOC(Field Oriented Control)简介:FOC,即磁场定向控制,又称为磁场矢量控制(VC, Vector Control)。这种控制方法的特点在于通过精确地控制磁场的大小与方向,使得电机的运动转矩平稳、噪声小、效率高,并且具有高速的动态响应。
- 工作原理:FOC无刷电机驱动器首先通过霍尔传感器或编码器等反馈装置获取电机转子位置信息,并将其反馈给控制器。控制器根据转子位置信息来确定电机磁场的定向,并通过逆变器和功率放大器等电子元件将电源电压转换成三相交流电。然后,控制器根据转子位置信息计算出合适的相位和幅值,并将交流电与特定时序输入到电机的相线圈上,从而产生所需的磁场。
- 磁场矢量控制:控制器中的磁场矢量控制算法会动态调整三相电流的相位和幅度,以实现磁场与转子磁场的定向一致,从而达到最佳转矩输出和转速控制。这种控制方法能够减少转矩脉动,提高效率,并扩展无刷直流电机的速度范围。
- 闭环控制:FOC无刷电机驱动器中通常采用闭环控制,通过不断监测电机状态和输出,将电流和转速等反馈信号与设定值进行比较,并对电流和输出进行调整,以实现精确的控制。
- 应用领域:FOC无刷电机驱动器广泛应用于各个领域,包括汽车行业(如电动汽车、混合动力车辆、电动自行车等交通工具的驱动系统)、工业自动化(如机器人、自动化生产线、输送机等工业设备的驱动控制)、家用电器(如洗衣机、空调、电视、厨房电器等家用电器的驱动系统)、医疗设备(如医疗器械、康复设备、电动轮椅等医疗设备的驱动控制)以及航空航天(如航空器、卫星等空中飞行器的电力传动系统)等领域。
总之,FOC无刷电机通过精确的磁场定向控制和闭环控制,实现了高效、平稳、低噪声的电机运动,并在各个领域得到了广泛应用。
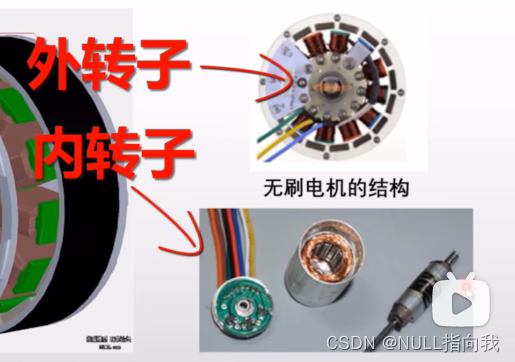
无刷电机的结构:
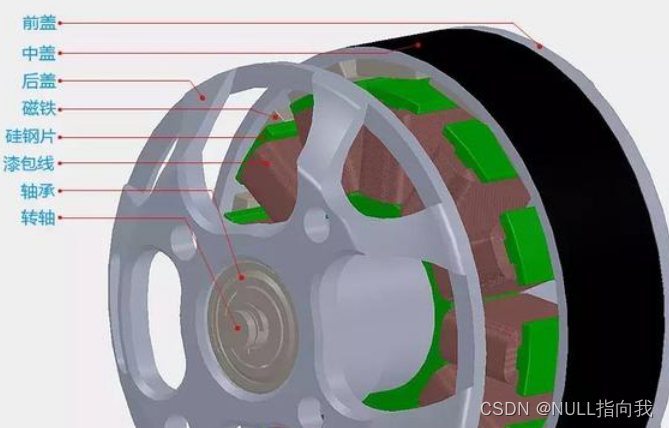
当然也可以直接简单的分为定子和转子,定子就是左边银白色得不转动的部分,黑色的就是转子,转子输出电机扭矩以及转速,同时适应不同外形条件,还分为内转子与外转子俩种类型:
无刷电机的运动:
无刷电机采用MOS管进行换向,MOS可以理解为开关,推过去不同MOS管的通断组合电机线圈电流的大小方向能够被改变,

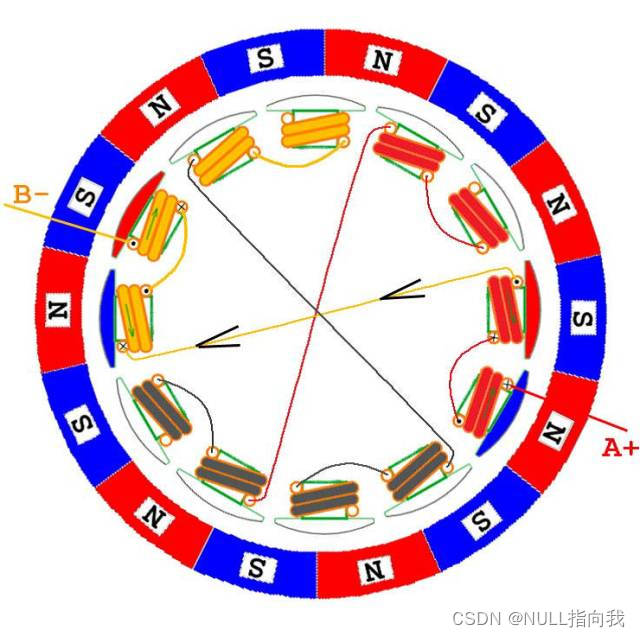
转子可以简单地抽象为一块磁铁,它的转动方向情况我们将其演示为右侧的条形磁铁,
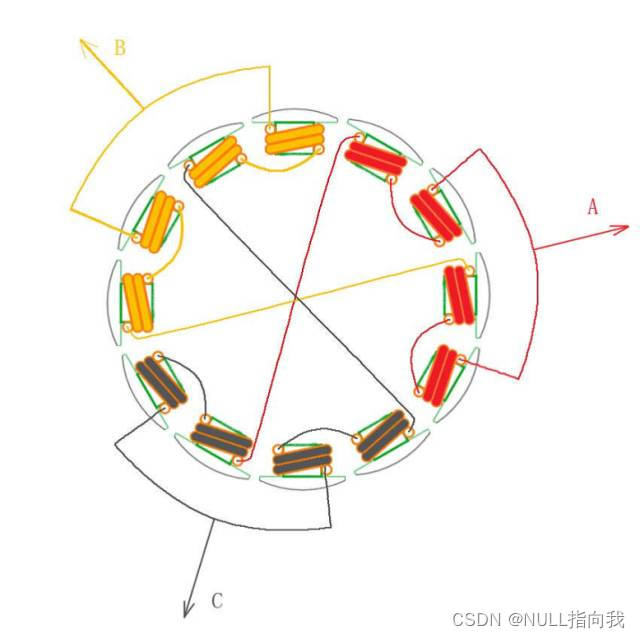
A\B\C三个相位,不同组合通电情况产生的磁场方向不同,因此引导转子的方向也不同
以下为网上搜索的图示:
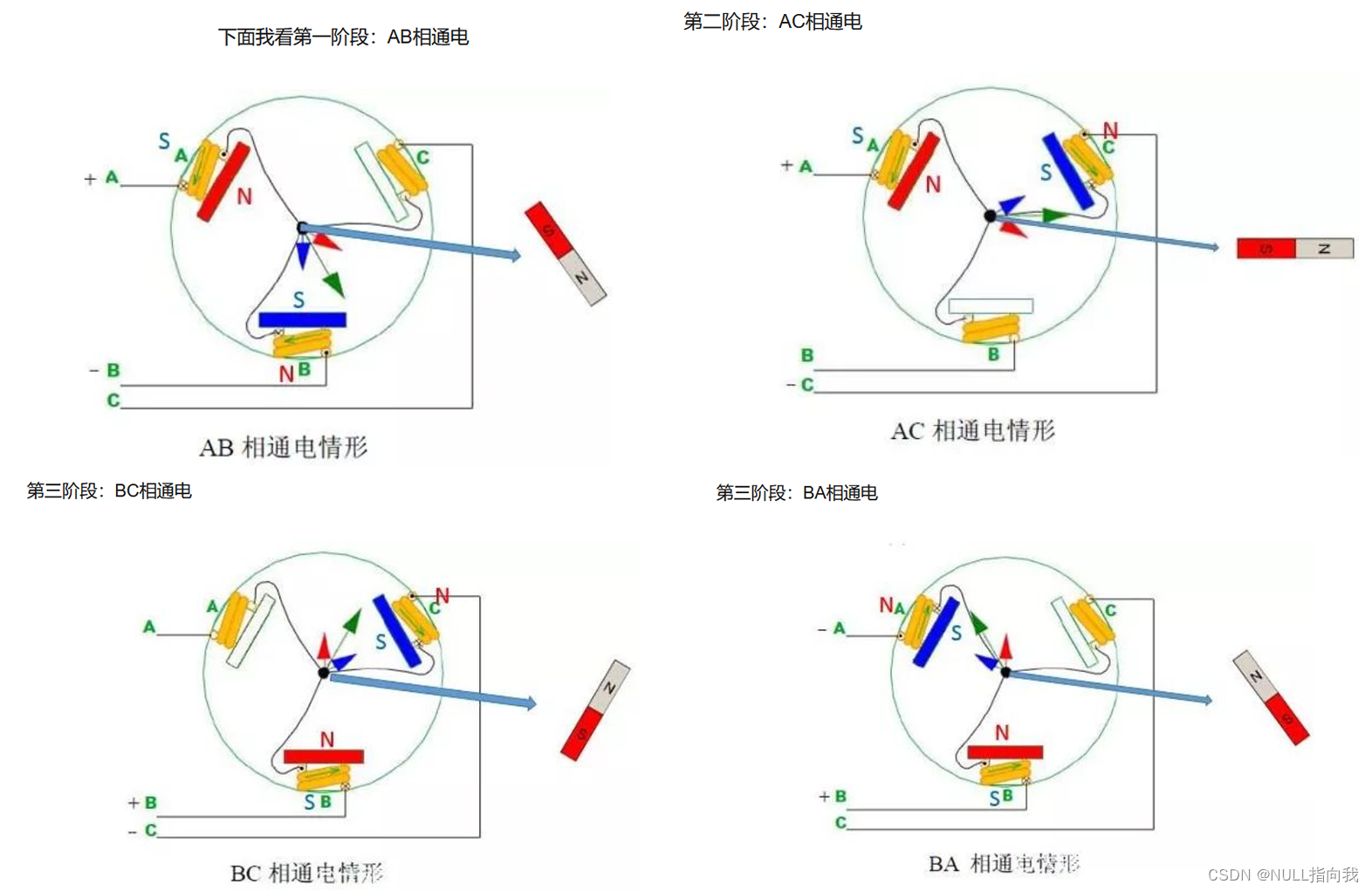
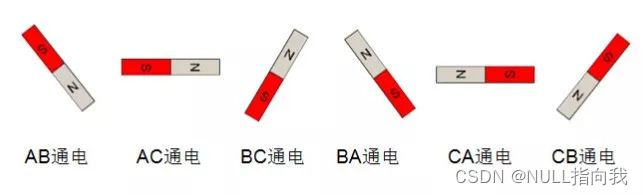
只需要不断的切换加到三相的电压,就能够使得磁场不断的旋转。我们将所有的情况列出来
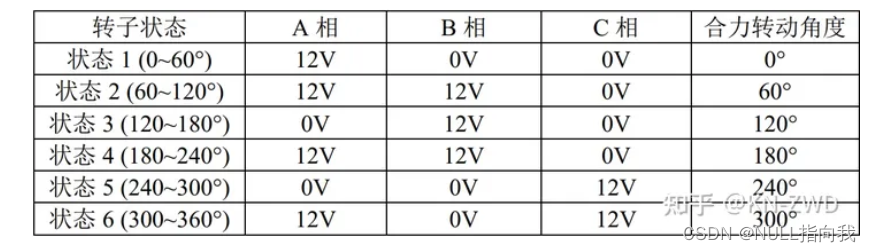
电压与进角对无刷电机控制的影响:
无刷电机的转速是由交流电压的频率和角度决定的。在无刷电机中,转子上的永磁体和定子线圈之间产生磁场,当定子线圈中的电流(即相位电压)发生变化时,这个磁场也会随之改变,导致转子运动。因此,无刷电机的转动角度和相位电压密切相关。
另外,进角也是影响无刷电机转动角度的重要因素。进角的作用是提供正确的时序控制信号,使电机的磁场转换速度与转子旋转速度同步,以便实现最优的转速和最大的扭矩输出效果。如果进角不正确,电机就会出现转速不稳定、扭矩减小、效率下降等问题。影响进角的因素包括转速、负载、电压和温度等。
无刷电机的对极:
无刷电机的“对极”通常指的是电机的极对数,这是一个描述电机特性的重要参数。极对数影响着电机的输出转矩、转速、启动性能和控制性能等多个方面。
具体来说,无刷电机的极对数是指转子磁铁NS级的对数。极对数的增加会导致电机的输出转矩增加,但同时电机的转速会下降。反之,如果极对数减少,电机的输出转矩会减小,但转速会升高。因此,在设计无刷电机时,需要根据实际需求来选择合适的极对数。
此外,无刷电机的极对数还与其结构有关。根据电机类型的不同,无刷电机可以分为端面定子、外壳定子、双定子和三定子等多种类型,每种类型的极对数也会有所不同。一般来说,极对数的范围在两个极的总和的2~10倍之间。
12绕组14极(即7对极),电机绕组绕发图:
无刷电机的极对数是指转子磁铁NS级的对数。极对数的增加会导致电机的输出转矩增加,但同时电机的转速会下降。反之,如果极对数减少,电机的输出转矩会减小,但转速会升高。
我使用的无刷电机就是7对极的:
尽管绕组和磁极的数量可以有许多种变化,但从电调控制的角度看,其通电次序其实是相同的,也就是说,不管外转子还是内转子电机,都遵循AB->AC->BC->BA->CA->CB的顺序进行通电换相。当然,如果你想让电机反转的话,电子方法是按倒过来的次序通电;
DJI 2312S电机和XXD 2212电机的(解剖图):

位置传感器:
无刷电机通常配备位置传感器,用于检测转子的位置。这些传感器向电子换向器提供反馈信号,确保定子线圈中的电流在正确的时刻改变方向,从而保持转子的连续旋转。
光电传感器:光电编码器是一种常见的位置传感器,用于检测电机转子的位置。在电机转子上,通常会安装有黑白相间的编码盘,光电编码器的光源和接收器会根据编码盘的转动产生脉冲信号。通过对这些信号的处理和分析,可以精确控制电机的旋转。
磁性传感器:另一种常见的位置传感器是磁性传感器,它通常用于检测磁场的变化。在无刷直流电机中,定子上通常会有多个磁极,磁性传感器可以检测到转子上的磁铁经过时产生的磁场变化,判断出转子的位置。
霍尔传感器:霍尔传感器也是一种常见的位置传感器,它利用霍尔效应来检测磁场的变化。在无刷直流电机中,定子上通常会有多个磁极,霍尔传感器可以检测到转子上的磁铁经过时产生的磁场变化,判断出转子的位置。
无刷电机驱动通常需要监测的物理量:
电流:监测电机定子线圈中的电流大小和方向是控制无刷电机驱动的关键。通过精确的电流监测,可以确保电机在适当的电流下运行,避免过流或欠流导致的问题,如损坏或性能下降。
电压:电压是电机驱动中另一个重要的物理量。监测电源电压可以确保电机在稳定的电压下运行,避免因电压波动导致的性能不稳定或损坏。
温度:无刷电机在运行时会产生热量,因此监测电机的温度非常重要。过高的温度可能导致电机损坏或性能下降。通过监测温度,可以采取适当的散热措施来保护电机。
转速:监测电机的转速是控制其性能的关键。通过实时监测转速,可以根据需要调整电机的输出,以满足不同的应用需求。
位置:对于某些应用,如需要精确控制电机位置的场景,监测电机的位置是必要的。这通常通过使用位置传感器来实现,如霍尔效应传感器或光学编码器。
转矩:在某些应用中,需要监测电机的转矩输出。这可以通过测量电机的电流和电压来间接计算,或者通过使用专门的转矩传感器来实现。
振动和噪声:监测电机的振动和噪声水平可以提供有关电机健康状况和性能的信息。异常的振动和噪声可能指示电机存在问题或需要维护。


















 8195
8195

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











