







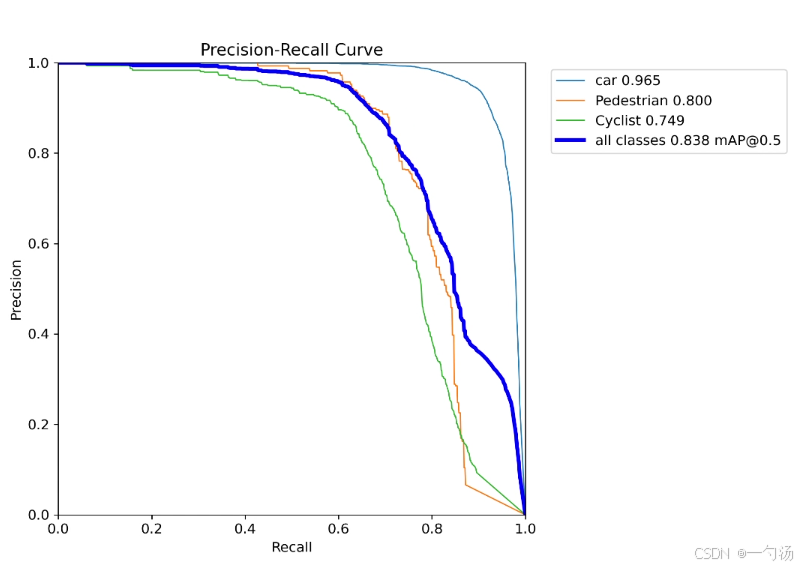
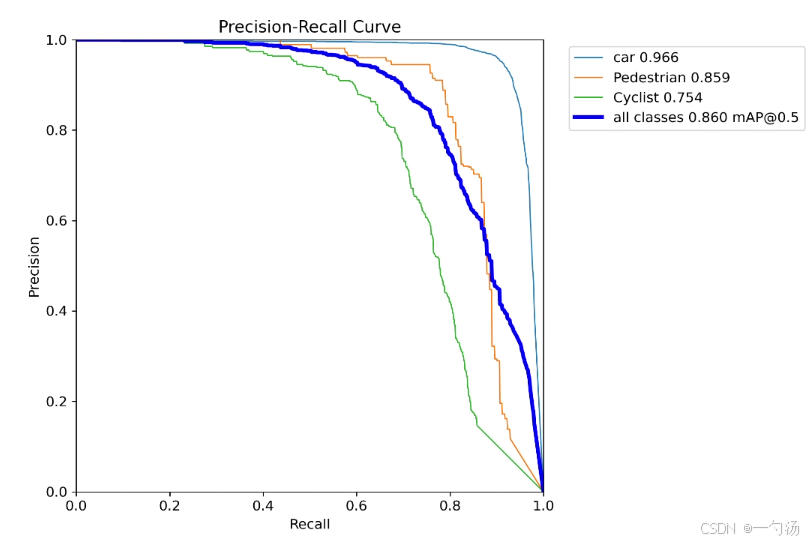
现有深度学习方法在遥感变化检测中存在特征融合局限于局部、多采用简单操作且对多尺度学习机制利用不足,以及特征聚合时多级特征交互困难、未考虑特征间耦合交互等问题,而 MDFM 通过一系列精心设计的操作,包括生成初始差异特征、多尺度融合、引入权重及最终融合等,有效整合双时相特征语义信息,减少噪声影响,从而解决了现有方法在特征融合方面的诸多问题。基于此,本文将 MDFM 应用于 YOLOv8 的 neck 部分的上下层拼接环节,旨在解决该部分在特征融合时忽略各层特征差异的问题,同时增强 neck 部分的多尺度特征,进一步提升模型整体性能。左边是原始模型,右边是改进后的模型。
1. 多尺度差异融合模块MDFM介绍
MDFM 主要用于融合双时相图像特征,并生成富含上下文信息的差异特征,具体过程如下:
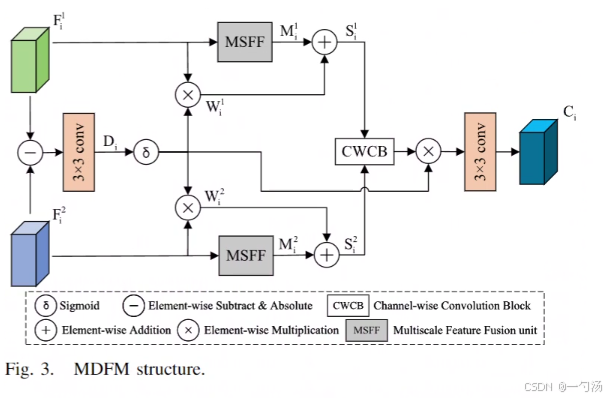
1. 特征提取与差异特征生成
首先从双时相图像中提取特征f1和f2。对f1和f2进行像素级相减操作,随后取绝对值。通过一个 3×3 的卷积操作处理上述结果,得到Di。
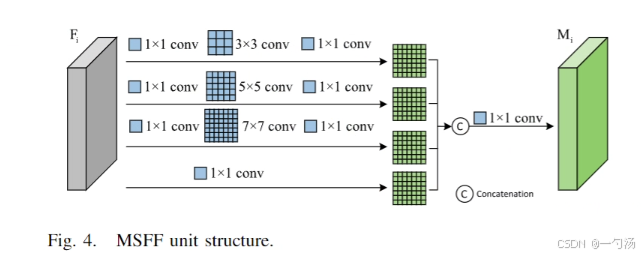
2. 多尺度特征融合(MSFF)
利用多尺度特征学习机制增强特征融合效果,该机制基于不同核大小的卷积实现多尺度融合,由 MSFF 单元完成。MSFF 单元包含四个分支的卷积操作,其中三个分支分别进行特定的卷积融合操作,具体为:
第一个分支:[1x1,3x3,1x1]
第二个分支:[1x1,5x5,1x1]
第三个分支:[1x1,7x7,1x1]
第四个分支:[1x1]
将这四个分支的结果进行拼接,得到融合后的特征。
3. 元素级通道权重与最终融合差异特征生成
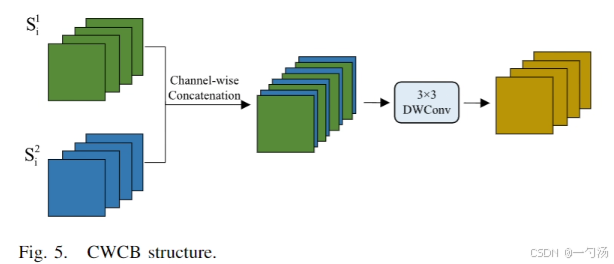
引入元素级通道权重,其计算与Fi和Di相关。将wi与之前得到的Mi相加,得到融合多尺度信息的Si。通过通道卷积块(CWCB)进行双时相特征融合操作,具体为将S1和S2逐通道拼接,然后先进行 3×3 深度卷积操作,再乘以wi,最终得到融合的差异特征Ci。
2. 接下来,我们将详细介绍如何将MDFM集成到 YOLOv8 模型中。
这是我的GitHub代码:tgf123/YOLOv8_improve (github.com)
这是改进讲解:YOLOv8模型改进 第二十一讲 添加多尺度差异融合模块MDFM 增强跨层拼接的特征_哔哩哔哩_bilibili
2.1 如何添加
1. 首先,在我上传的代码中yolov8_improve中找到FSDA.py代码部分,它包含两个部分一个是FSDA.py的核心代码,一个是yolov8模型的配置文件。

2. 然后我们在ultralytics文件夹下面创建一个新的文件夹,名字叫做change_models, 然后再这个文件夹下面创建mdfm.py文件,然后将mdfm的核心代码放入其中
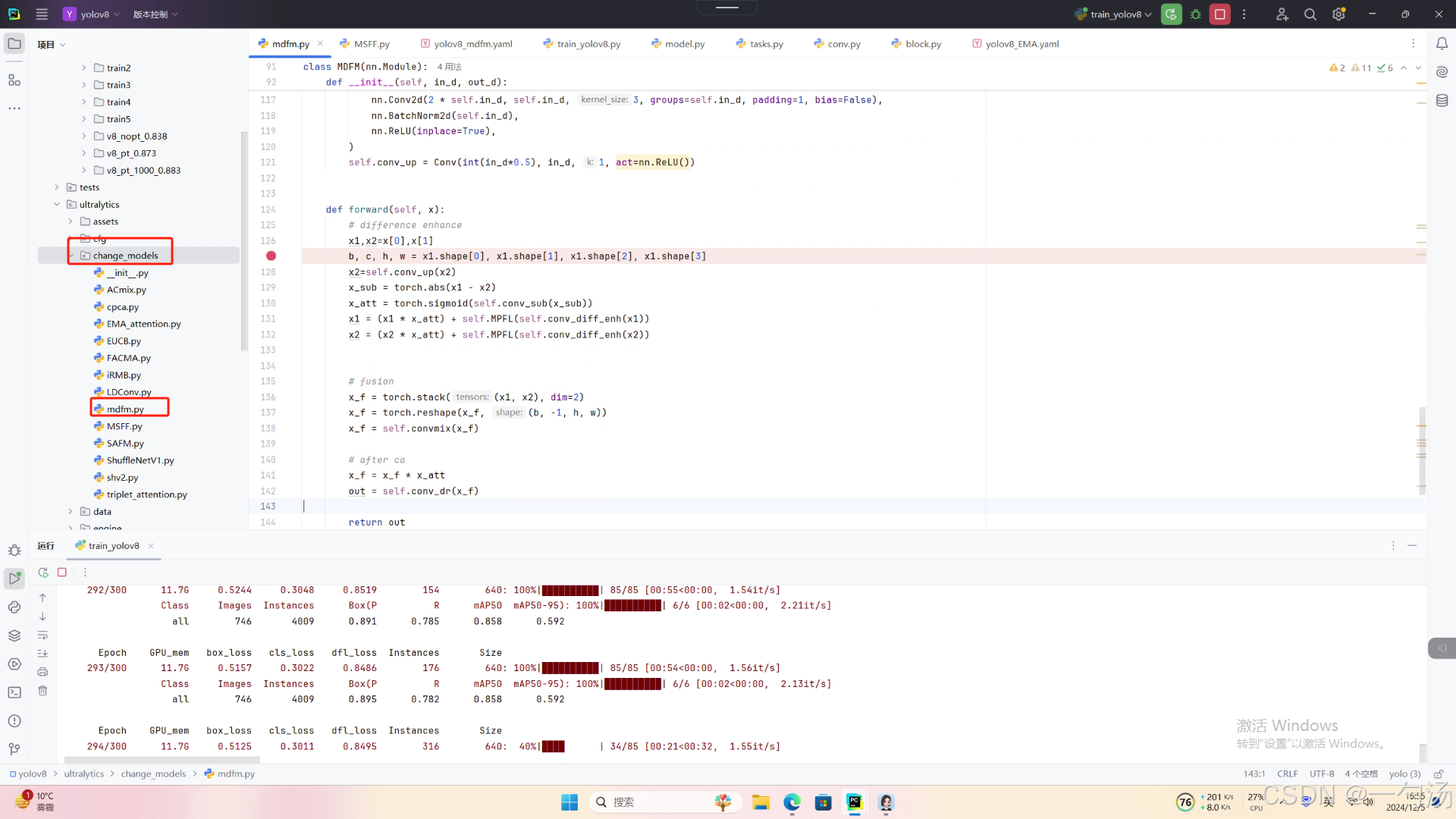
3. 在 task.py文件中导入mdfm
from ultralytics.change_models.mdfm import MDFM

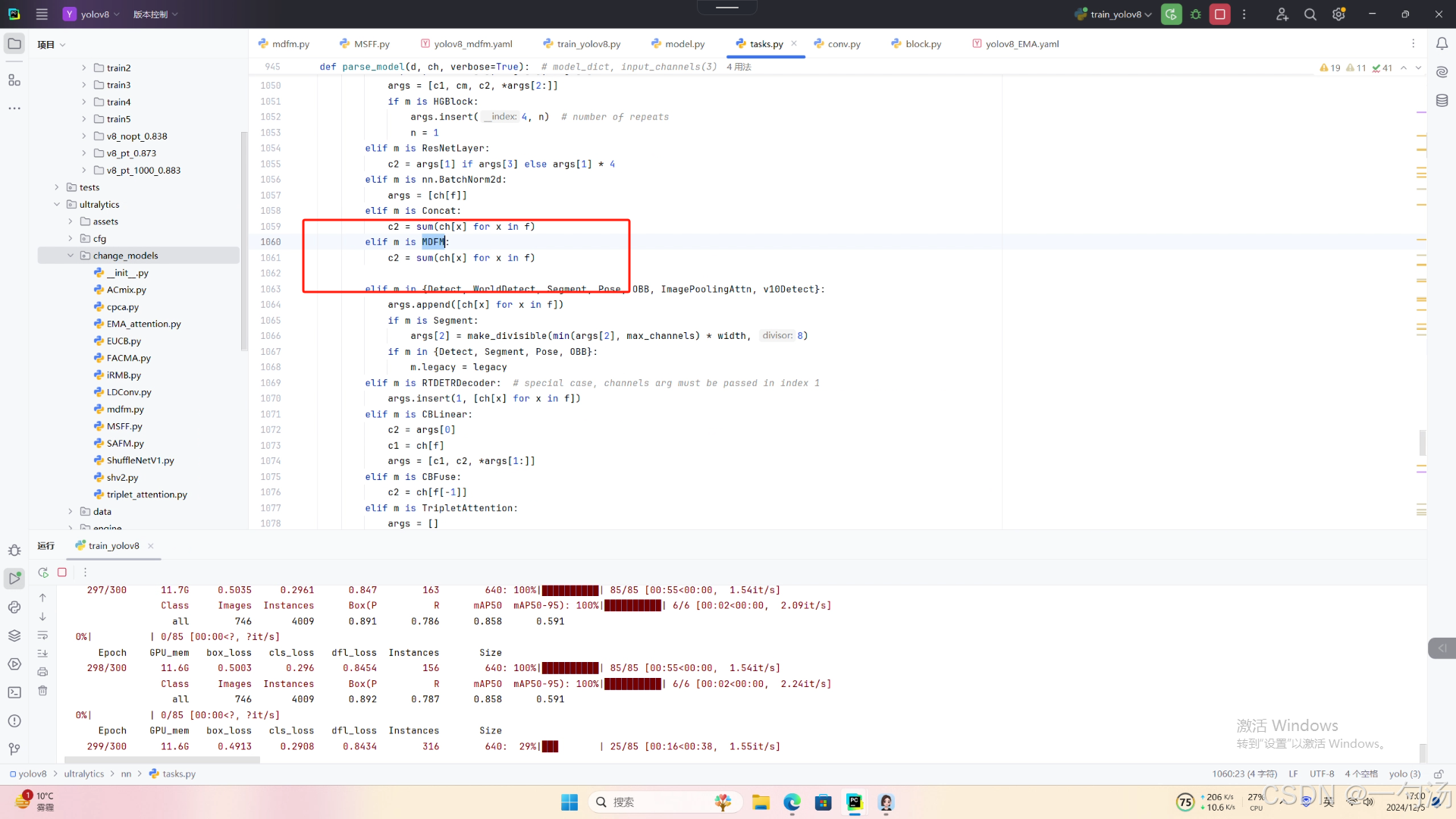
4. 然后将 mdfm添加到下面当中
5. 最后将配置文件复制到下面文件夹下

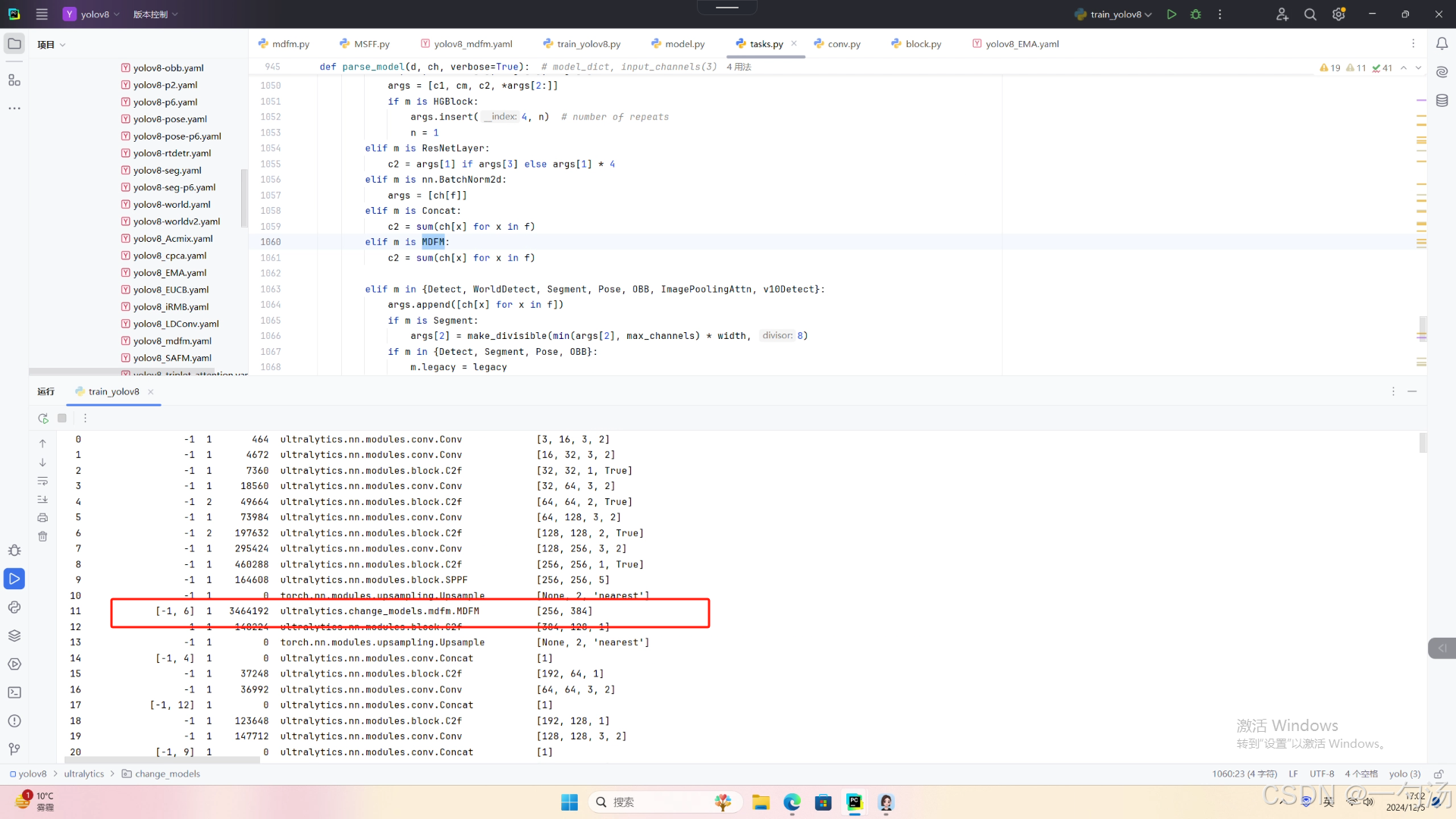
6. 运行代码跑通
from ultralytics.models import NAS, RTDETR, SAM, YOLO, FastSAM, YOLOWorld
if __name__=="__main__":
# # 使用自己的YOLOv8.yamy文件搭建模型并加载预训练权重训练模型
# model = YOLO(r"D:\model\yolov8\ultralytics\cfg\models\v8\yolov8_LDConv.yaml")\
# .load(r'D:\model\yolov8\yolov8n.pt') # build from YAML and transfer weights
#
# results = model.train(data=r'D:\model\yolov8\ultralytics\cfg\datasets\VOC_my.yaml',
# epochs=300,
# imgsz=640,
# batch=16,
# # cache = False,
# # single_cls = False, # 是否是单类别检测
# # workers = 0,
# # resume=r'D:/model/yolov8/runs/detect/train/weights/last.pt',
# # amp = True
# )
# 使用YOLOv8.yamy文件搭建的模型训练
model = YOLO(r"D:\model\yolov8\ultralytics\cfg\models\v8\yolov8_mdfm.yaml") # build a new model from YAML
model.train(data=r'D:\model\yolov8\ultralytics\cfg\datasets\VOC_my.yaml',
epochs=300, imgsz=640, batch=64
# , close_mosaic=10
)
# # 加载已训练好的模型权重搭建模型训练
# model = YOLO(r'D:\bilibili\model\ultralytics-main\tests\yolov8n.pt') # load a pretrained model (recommended for training)
# results = model.train(data=r'D:\bilibili\model\ultralytics-main\ultralytics\cfg\datasets\VOC_my.yaml',
# epochs=100, imgsz=640, batch=4)


















 2179
2179

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









