









安装好 mavros 之后,进入
/home/melodic/catkin_ws/src/mavros/mavros/launch
将 px4.launch 文件中 "fcu_url" 修改成如下:
<arg name="fcu_url" default="udp://:14540@127.0.0.1:14557" />
使用 ROS 运行该文件(mavros)
roslaunch mavros px4.launch再运行 PX4
make px4_sitl_default none_iris即可连接成功
先后顺序不能乱
mavros:

PX4:
连接成功即可做一次测试
rostopic echo /mavros/state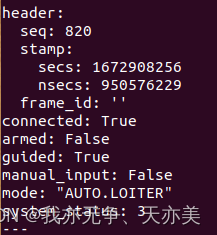
连接成功 connected:True 反之为False
再将无人机解锁
rosservice call /mavros/cmd/arming True可以看到无人机解锁并且螺旋桨开始旋转
![]()
即可通过 ROS 去控制 PX4 控制无人机。


















 7817
7817

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











