







 本文指导如何解决Mavlink通信问题,首先检查硬件接线和串口输出,确认cat命令结果;然后检查px4.launch配置中的驱动名称、波特率及sys_id一致性,确保/mavros/state话题的连接状态正确。
本文指导如何解决Mavlink通信问题,首先检查硬件接线和串口输出,确认cat命令结果;然后检查px4.launch配置中的驱动名称、波特率及sys_id一致性,确保/mavros/state话题的连接状态正确。
1 首先检查基本的硬件接线
用cat命令查看串口有没有数据输出,如果没有,说明可能是串口接线不对(如tx和rx接反了等等)或者飞控mavlink口设置不对没有mavlink数据输出。
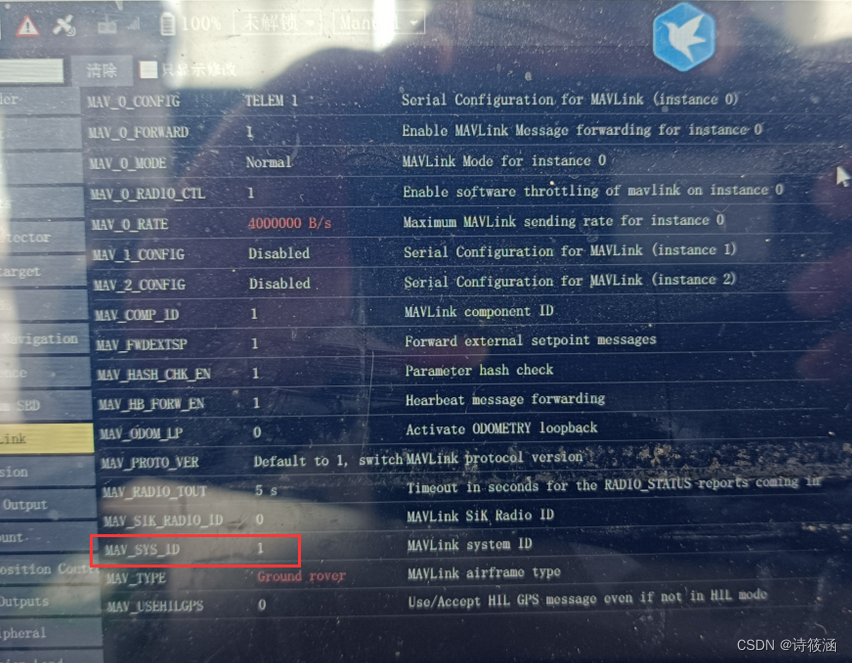
cat /dev/ttyTHS02 在用cat命令串口有数据输出的基础上,/mavros/state话题的conneted项为false,此时检查px4.launch里的串口驱动文件名称是否正确,波特率是否和飞控中对应串口波特率一致。 px4.launch中的sys_id和飞控中mavlink口的mav_sys_ID是否一致(集群多机时会出现这种情况),如果不一致也会导致/mavros/state话题的conneted项为false。


















 1088
1088

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











