







结构光3D相机原理?
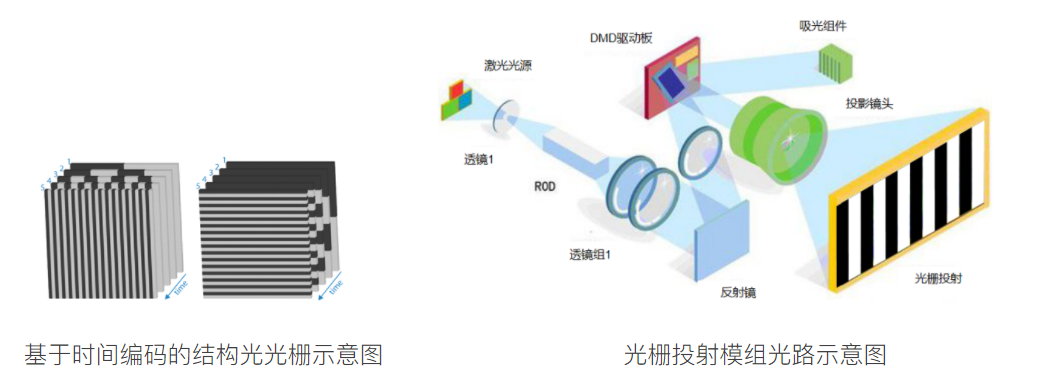
结构光3D相机,一般指采用多幅条纹光栅,即先通过光栅投射模组按照时间序列依次投射在被测物体表面,再通过双目对物体表面的光栅进行拍照,基于事先编码规则进行解码和双目视差匹配,从而获得高精度的3D点云。由于结构光3D相机采用了多幅光栅进行编码,原理上编码精度可精细到1个像素甚至亚像素,相比其它原理的点云质量和精度会更好一些,已逐渐成为业内主流。
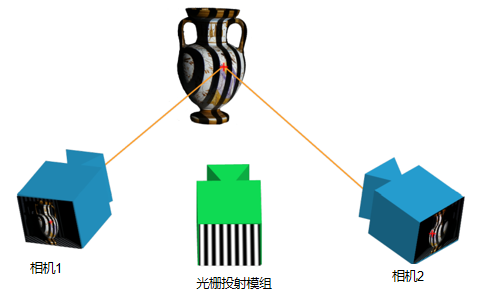
结构光3D相机结构示意图
在工业应用中,光栅编码质量是影响结构光3D相机点云质量的关键。在机械臂臂展小于1.5m的场景下,适配的结构光3D相机幅面小,较弱的环境光对光栅的影响也往往较小。在大视野下(和臂展大于2m的机械臂配合),较强的环境光强对光栅的影响较大,从而导致光栅亮暗对比度不明显,即信噪比低(有效光栅信号和环境光噪声的比值)。因此,提高光栅投射亮度是高信噪比的关键。
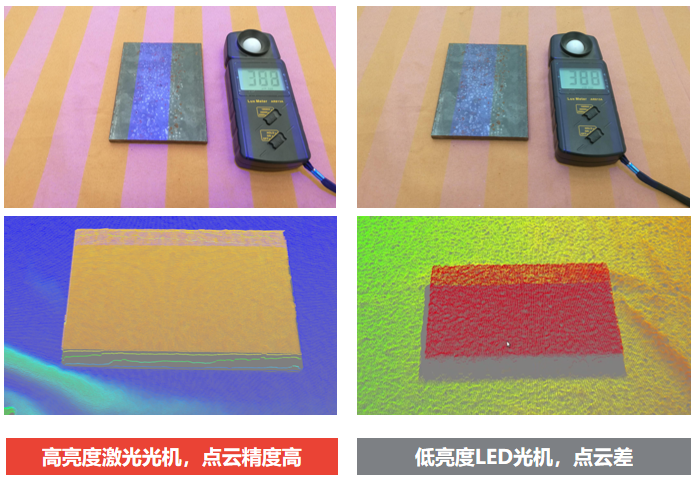
3880lux环境光强对光栅编码和点云质量的影响对比
光栅投射模组(光机),本质上是一种专用的投影仪,其性能受核心芯片DLP/DMD的影响。DLP/DMD在国际上仅德州仪器TI公司生产,按照工业级DLP/DMD芯片分类:在0.45英寸DMD以下一般采用LED光源(用于照明),DLP芯片支持的LED光源的功率有限,会导致亮度存在瓶颈;在0.65英寸DMD以上属于工业投影范畴,支持极高的光源功率。因此,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2503
2503











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









