







一、 基础知识
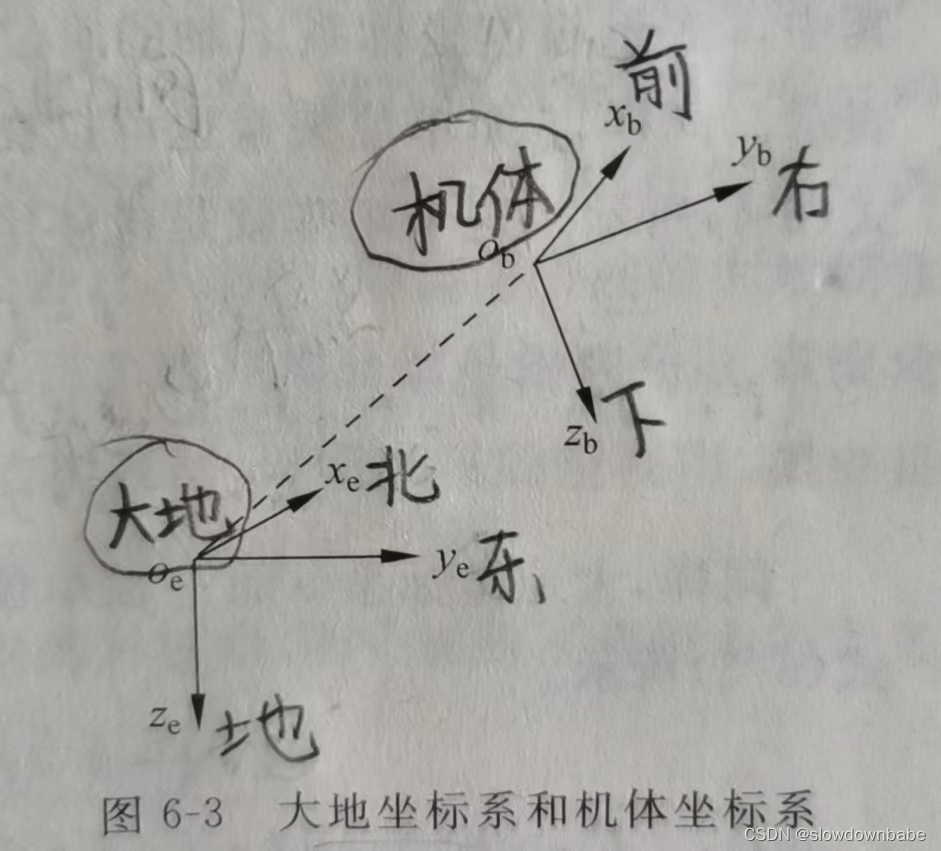
1. 坐标系:遵循右手定则
1.1 大地坐标系(地球坐标系):北(x轴)东(y轴)地(z轴),地就是向下指向地
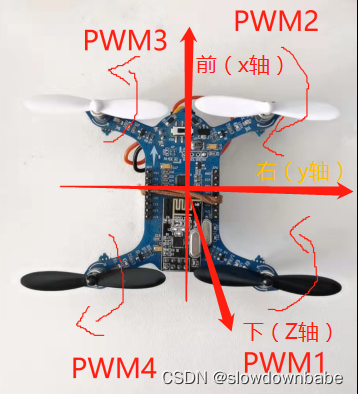
1.2 机体坐标系: 前(x轴)右(y轴)下(z轴)
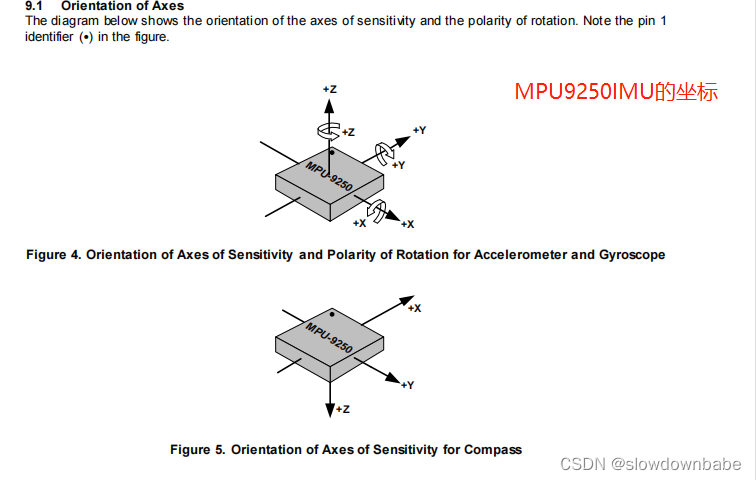
1.3 IMU坐标系:该坐标系就是IMU本身的坐标系,一般无人机的IMU都是在飞控的中间,因此,IMU坐标系和机体坐标系可以看做有相同的原点,只需要简单的改变一下坐标轴的正负号就能和机体坐标系一致了,并不需要复杂的旋转。
2.姿态: 横滚(roll)俯仰(pitch) 偏航(yaw)
如果所示:
横滚(roll): 绕x轴旋转的动作叫横滚,向右横滚为正方向,向左横滚为负方向;
俯仰(pitch):绕y轴旋转的动作叫做俯仰,向上(抬头)为正方向,向下为负方向;
偏航(yaw): 绕z轴旋转的动作叫做偏航,向右偏航为正方向,向下偏航为负方向。
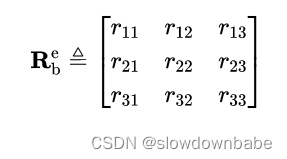
3. 旋转矩阵
一般定义旋转矩阵为
然后欧拉角和四元数都可以表示旋转矩阵,欧拉角和四元数可以互换。然后一般在无人机上,都是用四元数来表示欧拉角的。
4. 欧拉角:横滚角(roll angle)俯仰角(pitch angle) 偏航角(yaw angle)
3.1 姿态角也叫欧拉角。
横滚角(roll angle): 绕x轴横滚的角度,向右横滚为正方向,向左横滚为负方向;
俯仰角(pitch angle):绕y轴俯仰的角度,向上(抬头)为正方向,向下为负方向;
偏航角(yaw angle): 绕z轴偏航的角度,向右(顺时针)偏航为正方向,向左(逆时针)偏航为负方向。
3.2 欧拉角表示旋转,旋转顺序是Z-Y-X。
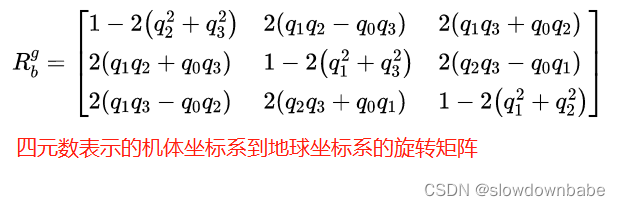
下面的矩阵是机体系到地球系的旋转矩阵。
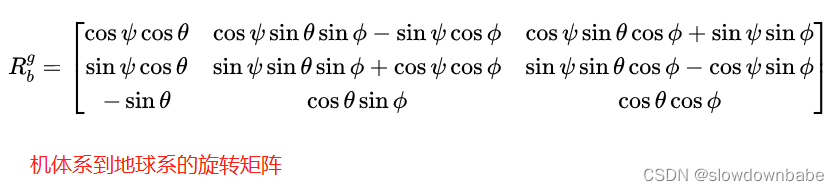
如果将一个机体系转到地球系就是用上面的矩阵。
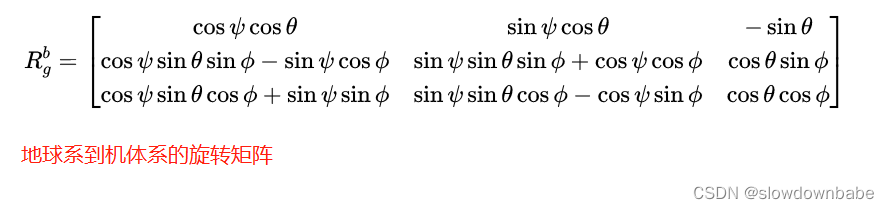
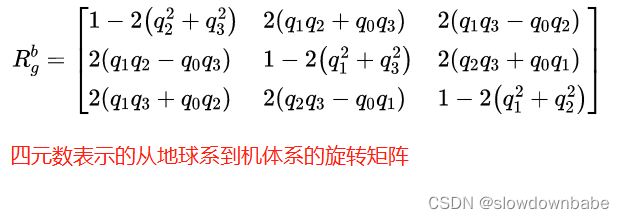
下面是地球系到机体系的旋转矩阵。
下面的意思就是将地球系vg通过地球系到机体系的旋转矩阵旋转至机体系。
5. 四元数
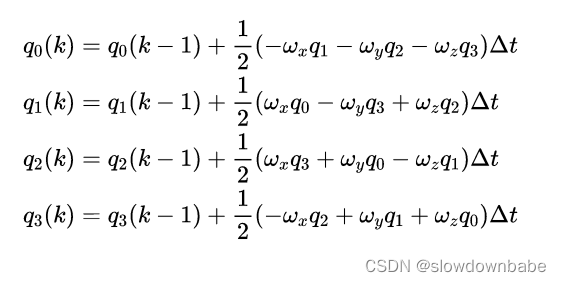
4.1 四元数:q0,q1,q2,q3,软件中默认初值分别是0,1,1,1。
四元数的更新(即q0,q1,q2,q3怎么来):根据陀螺仪的数据来更新四元数
△t : 是读取陀螺仪的时间,也是调用姿态解算的时间。
wx,wy,wz:分别是陀螺仪测量到的值,单位是弧度每秒,rad/s. 如果用的是度每秒,那么最终的姿态是:你稍微动一下,姿态就变化很大。
4.2 四元数表示的矩阵
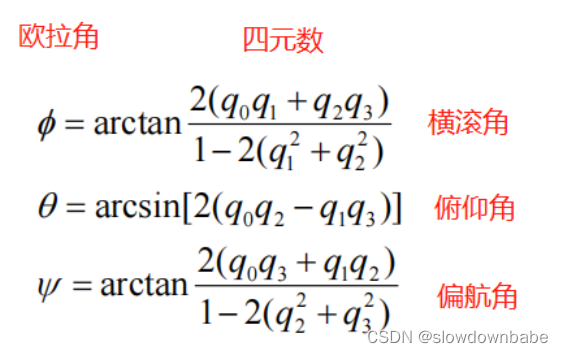
6. 用四元数表示欧拉角
欧拉角是地球系下的表示;传感器的数值是在机体系上表示的,因此,需要将机体系转换到地球系。所以要用到下面的旋转矩阵。
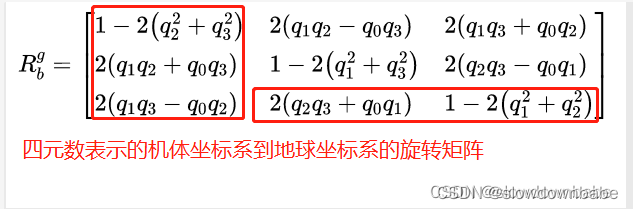
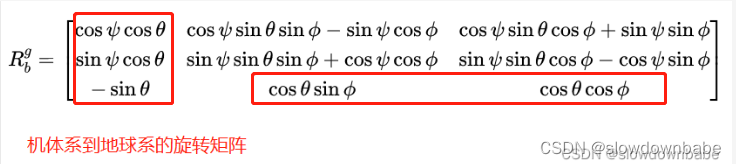
对比红框的内容就可以用四元数表示欧拉角了:
二、Mahony 互补滤波算法
开源代码位置:https://x-io.co.uk/open-source-imu-and-ahrs-algorithms/
源文件在 《四、代码 》 Algorithm/madgwick_algorithm_c的压缩包中。

传入的数据:校准且滤波后的九轴数据。其中,陀螺仪的单位要从度转换成弧度,不然的话,稍微动一动IMU,姿态就变换很大。
gyro.x = gyro.x * DEG2RAD; /* 度转弧度 */
gyro.y = gyro.y * DEG2RAD;
gyro.z = gyro.z * DEG2RAD;
三、 PID控制:Mahony互补滤波中只用到了P和I。
代码中的下面三个参数是需要根据实际来进行修改的。

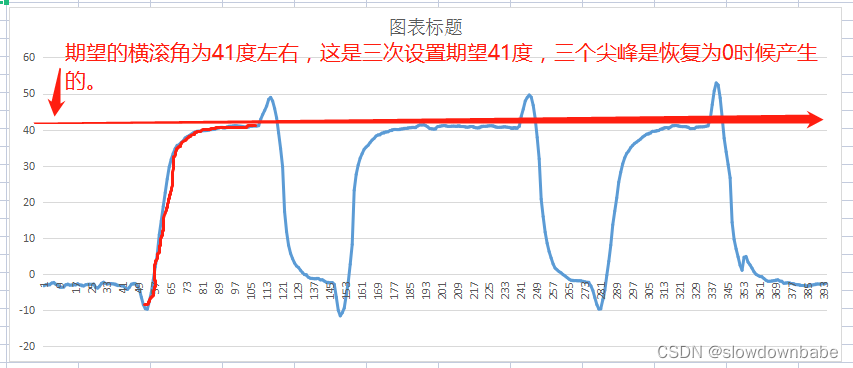
这里我只用到了比例调节。下面是根据横滚角输出的PID图,可以看到姿态到达目标姿态还是很快的。
四、代码
gitee 搜索 stm32_minidrone
如果错误,请指正。














 957
957











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









