








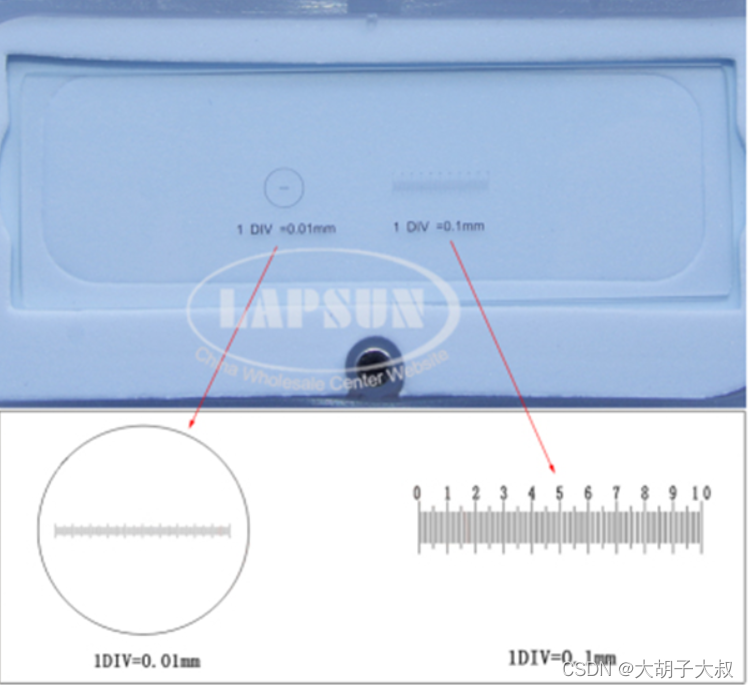
校准尺,最小测量刻度为0.1mm
上图为手机拍的看不清,放了一个网上找的图,校准的详细参数见下图
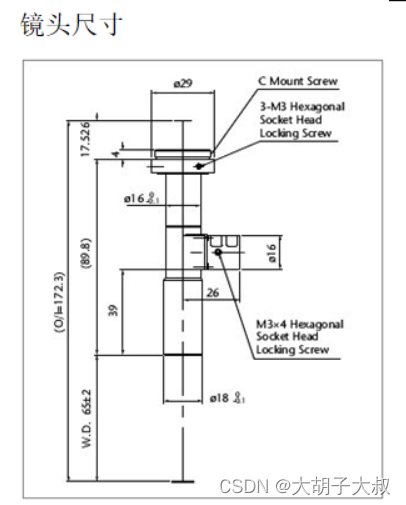
例如:物距为116mm的显微镜头,这种镜头没有景深,只能测镜头前端到物体116mm的物体 ,几乎没有景深,这个比较麻烦,需要严格保证镜头于被测物之间的距离。如果不能保证检测距离的话,靠前或靠后的位置呈像将会非常模糊。
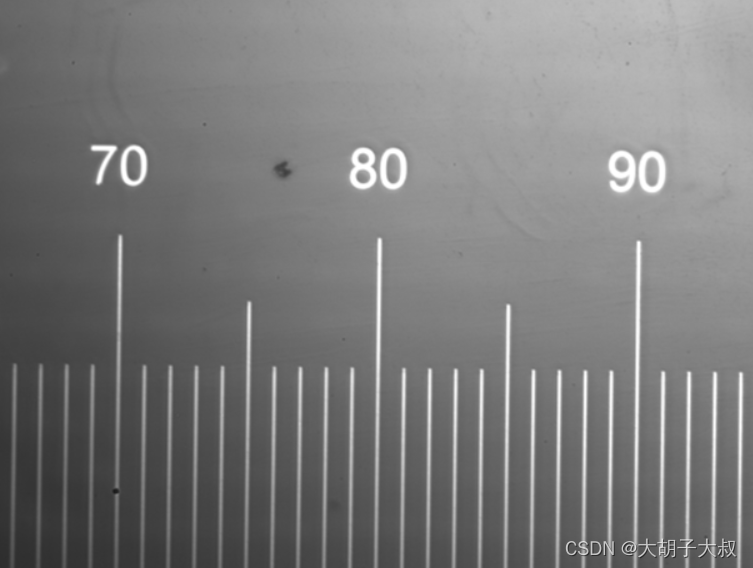
上图为加了同轴光源拍摄的校准尺的图像,可以看见拍的非常清楚,放大了很多倍。
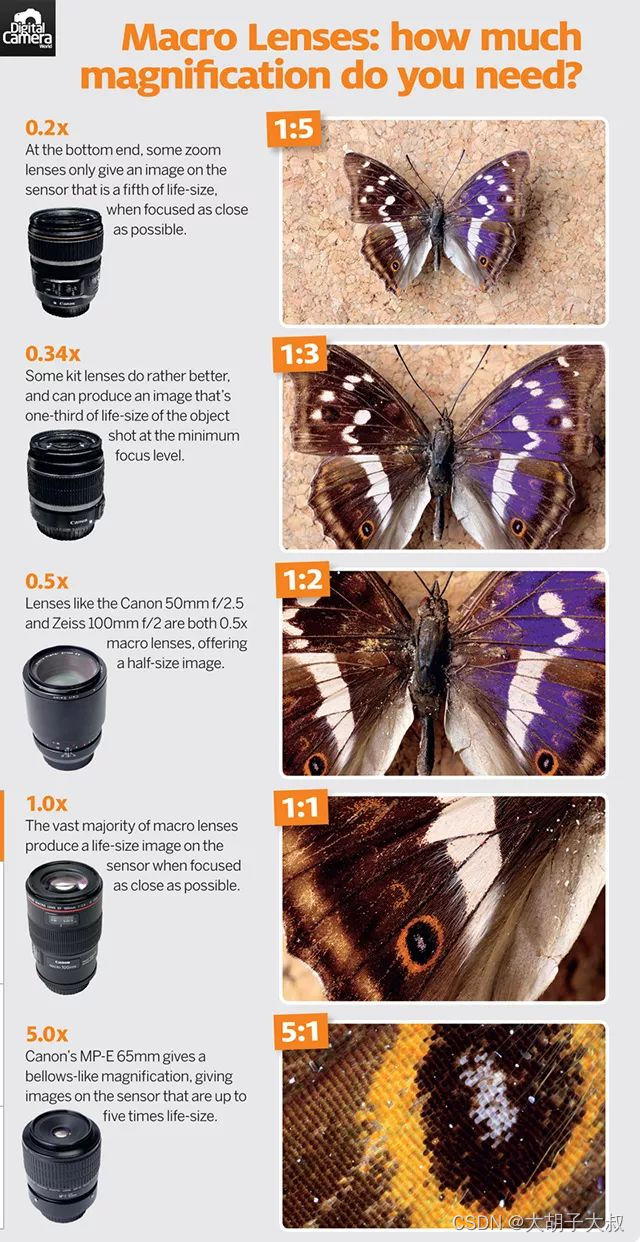
某70-200mm焦段的镜头标称放大倍率为1/6.5,是指该镜头在200mm焦段、能清晰成像的最短拍摄距离拍摄时,焦平面上的成像与被摄物体实际大小的比值为1/6.5。
大多数相机镜头的放大倍数是小于1的,也就是说大多镜头的成像其实是缩小的。
显微镜的放大倍数是指什么
1、显微镜的放大倍数是指目镜与物镜放大倍数的乘积,放大的是物像的长度或宽度.如目镜的放大倍数是10倍,物镜的放大倍数是40倍,该显微镜的放大倍数═10×40═400倍。
2、总放大倍数有两种概念,一种是光学放大倍数,一种是数码放大倍数(只有连接成像设备时才会涉及到数码放大倍数)。
下图是一个关于放大倍率的效果图
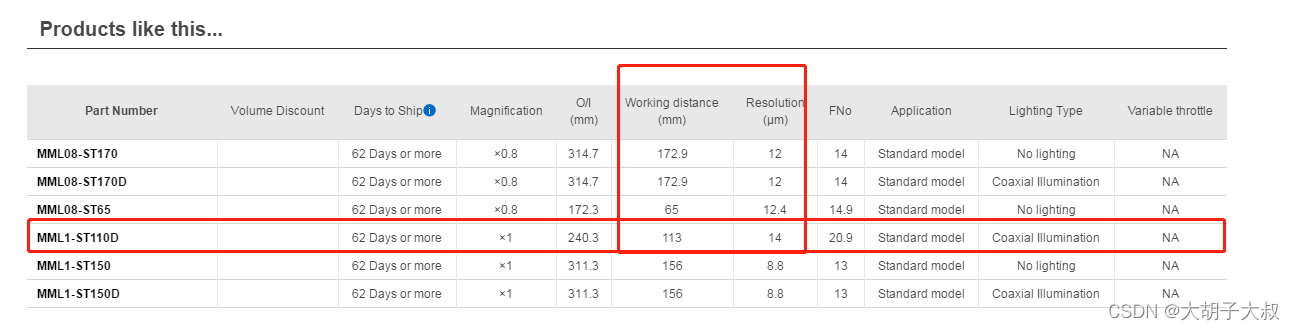
上图参数为常见工业显微镜头的参数,请忽略我画的红框。
/*----------------------------------------------------------------------------------
// 作 者: 大胡子大叔
// 版权声明: 未经同意请勿转载,里面有几张图来自网络,如果侵权请联系删除
----------------------------------------------------------------------------------*/


















 8245
8245

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











