






1、前提:
最近在用turtlebot3做路径规划仿真。
关于turtlebot3,详情可以查看GitHub - ROBOTIS-GIT/turtlebot3: ROS packages for Turtlebot3。
2、问题的出现:
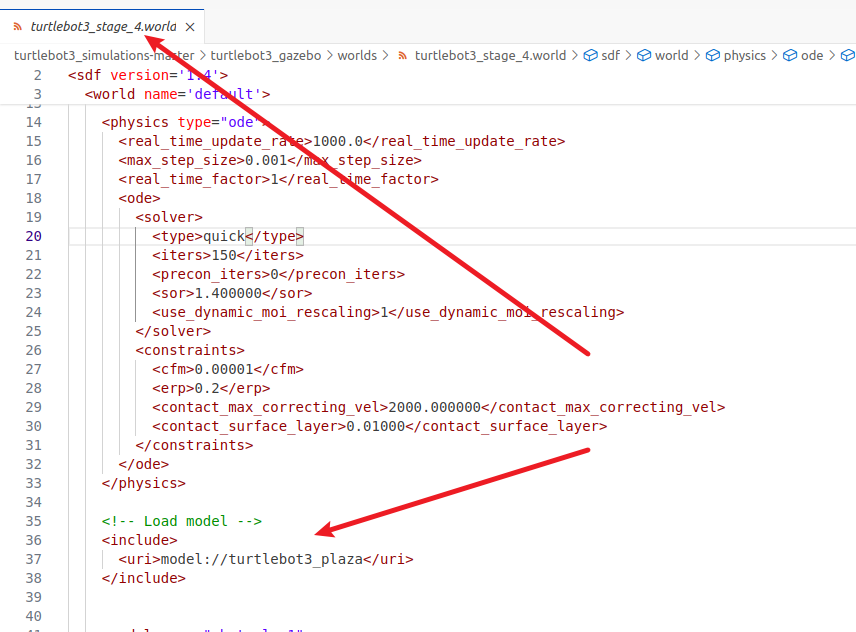
在打开world(地图)文件后,有一个load model模块。但我并不知道这个,地图文件在哪。或者说我应该如何修改,地图文件。即我们能自己定义一个地图,载入到gazebo。
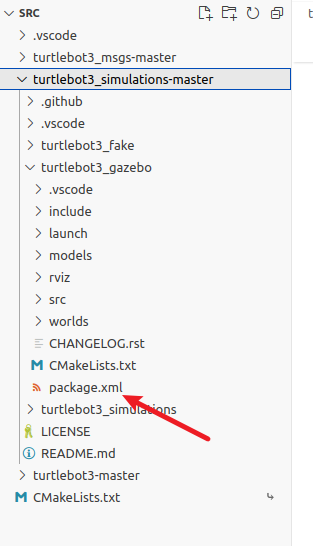
在gitclone完turtlebot3文件后。我们可以看到如下目录。打开xml文件添加

<export>
<gazebo_ros gazebo_media_path="${prefix}"/>
<gazebo_ros gazebo_model_path="${prefix}/models"/>
</export>
将模型添加到指定的路径,后
再次我们在主目录下使用Ctrl+h 打开隐藏文件。找到.gazebo/models/turtlebot3_plaza。
在里面加入sdf模型。就可以在gazebo中载入了
















 3069
3069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











