









1. 概述
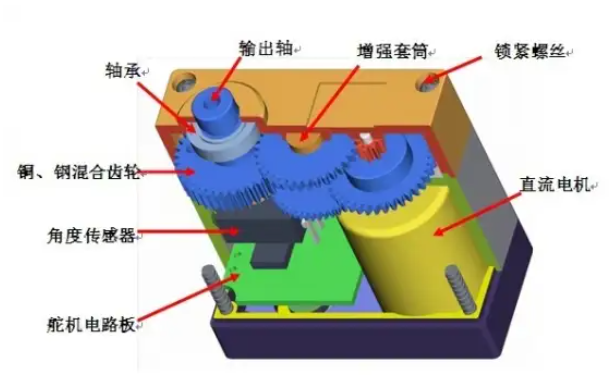
舵机(Servo Motor)是一种带有反馈环节的伺服电机,是简化的伺服系统,核心由马达、减速齿轮组、电位器(位置传感器)和简易控制电路组成,通过电位器或编码器实时监测位置,并根据输入信号调整输出,主要用于低精度场景,如航模和小型机器人。舵机和伺服电机的核心区别在于应用场景、控制精度和系统构成,伺服电机主要是工业级的高精度闭环控制系统。不同分类的舵机在控制方式、响应速度、负载能力 等方面各有侧重,需根据应用场景选择:
- 低成本简单控制 :传统PWM模拟舵机;
- 高精度动态控制 :数字舵机或总线伺服舵机;
- 连续旋转需求 :360°舵机
- 复杂系统多机协同 :优先选用总线伺服舵机。
| 类型 | 控制方式 | 特点 | 应用场景 |
|---|---|---|---|
| 传统PWM舵机 | PWM信号 | 成本低、结构简单,抗干扰弱 | 航模、基础机器人 |
| 总线伺服舵机 | RS-485/CAN总线 | 多机控制、抗干扰强,高可靠性 | 工业自动化、无人机云台 |
| 模拟舵机 | 模拟电路 | 响应慢,成本低,易受噪声干扰 | 玩具级航模、简单控制 |
| 数字舵机 | 数字电路(MCU) | 响应快、精度高,支持编程 | 医疗设备、高精度机器人 |
| 塑料齿舵机 | - | 轻便廉价,负载能力低 | 小型机器人 |
| 金属齿舵机 | - | 耐用性强,重量大 | 工业机械臂 |
2. 按控制信号分类
2.1 传统PWM舵机
通过接收PWM信号来控制电机的旋转角度,PWM信号的占空比决定了电机的转速和方向,标准周期为20ms,脉宽范围0.5ms到2.5ms,对应0°到180°。
特点 :
- 模拟舵机响应较慢,抗干扰能力弱;数字舵机响应更快,精度更高。
- 结构简单、成本低,但通信距离较短。
应用场景 :
- 航模(固定翼无人机舵面控制)、基础机器人关节、遥控车转向系统
2.2 总线伺服舵机
总线伺服舵机即串行总线智能舵机,实际上可以理解为数字舵机的衍生品,数字舵机与模拟舵机相比而言是控制系统设计上的升级,而总线伺服舵机对于舵机而言则是在功能和运用上的升级,总线伺服舵机的工作原理与普通数字舵机相似,但增加了串行总线通信功能。它通过串行总线(如I2C、SPI及RS-485等)与控制器通信,接收控制信号并执行相应的动作。这种设计使得总线伺服舵机能够与其他设备进行数据交换和同步,提高了系统的灵活性和可扩展性。

特点 :
- 采用总线通信(如RS-485、CAN),支持多机串联控制,抗干扰能力强,通信距离远。
- 可实时反馈状态(如温度、负载),支持高级功能(如位置闭环控制)。
- 成本较高,需专用控制器。
应用场景 :
- 工业自动化(如机械臂)、无人机云台控制、医疗设备(手术机器人关节)
3. 按控制电路分类
3.1 模拟舵机
基本概念 :使用模拟电路处理输入信号,通过比较器直接控制马达转向。
原理 :
- 输入信号与电位器反馈的模拟电压比较,产生误差信号驱动电机;
- 响应速度较慢,易受噪声干扰。
特点 :
- 使用模拟电路处理信号,对微小指令变化反应迟缓,电机转速较慢。
- 成本低,但长期使用易受噪声干扰。
应用场景 :
- 对精度要求不高的场景,如玩具级航模、简单机器人动作控制
3.2 数字舵机
内置微处理器(MCU)和晶振,通过数字算法处理信号,精度更高。
原理 :
- MCU以高频采样输入信号和反馈数据,计算最优驱动策略;
- 支持高级功能(如动态响应调节、堵转保护)。
特点 :
- 内置微处理器(MCU)和晶振,通过数字算法精确控制电机,响应速度快、角度精度高。
支持编程功能(如自定义转速、限位保护),部分型号可切换舵机/电机模式。
应用场景 :
- 高精度需求场景,如工业机器人、无人机云台、康复设备
4. 按旋转角度分类
4.1 180°舵机
输出轴旋转范围限制在0°~180°(±90°),用于精确定位。
原理 :
- 电位器机械限位或软件限位防止过转;
- 适用于需要固定角度控制的场景(如机器人关节)。
4.2 360°舵机
输出轴可连续旋转,类似普通电机,但通过脉宽控制转速和方向。
原理 :
- 移除电位器机械限位,固定电位器阻值;
- 脉宽决定转向(如1.5ms停转,<1.5ms正转,>1.5ms反转)。
5. 按使用对象分类
- 航模舵机 :轻量化设计,高响应速度,用于飞机襟翼、尾翼控制。
- 机器人舵机 :高扭矩、高精度,用于人形机器人关节或机械臂。
- 船模舵机 :防水性能强,用于遥控船方向控制。
- 车模舵机 :耐振动,用于遥控车转向系统。
6. 按材质分类
- 塑料齿舵机 :齿轮组为塑料材质,成本低、重量轻,适用于低负载场景。
- 金属齿舵机 :齿轮组为金属(如铝合金、钢),耐用性强,适用于高扭矩场景。


















 1889
1889

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











