







更多优质内容,请关注公众号:智驾机器人技术前线
1.论文信息
-
论文标题:HoMap: End-to-End Vectorized HD Map Construction with High-order Modeling
-
作者:Yingfeng Cai, Wei Dong, Ze Liu, Hai Wang and Long Chen
-
作者单位:江苏大学
-
论文链接:https://ieeexplore.ieee.org/abstract/document/10638726
2.摘要
在线矢量化高清地图的构建对于自动驾驶中的下游规划和决策至关重要。现有方法通过将地图元素建模为描述其形状的点集合,为这项任务建立了坚实的基线。然而,地图元素之间复杂的几何关系尚未得到充分研究,导致在处理诸如多行人过街等问题时出现显著误差。在本文中,提出了HoMap,这是一个端到端在线矢量化高清地图构建框架,有效捕捉实例之间的复杂关系。具体来说,引入了高阶建模的概念用于地图构建任务,这涉及在高维空间中划分每个实例并计算高阶统计数据以捕捉地图元素之间的相关性。然后,将统计注意力作为鸟瞰图增强模块纳入其中,以加强语义和几何信息。此外,实例查询用作解码器的输入,这提高了查询能力并避免了实例信息的不一致性。HoMap在nuScenes和Argoverse2数据集上实现了最先进的性能,同时在复杂驾驶环境中保持了良好的制图结果。
3.主要贡献
-
提出了一种建模方法,利用高阶统计信息来捕捉地图实例之间的相关性。这种方法有效地学习了实例之间的复杂几何关系,从而准确描述了地图元素的形状;
-
前面讨论的高阶建模概念基础上,提出了HoMap,这是一个端到端的在线高清地图构建框架。HoMap使用实例查询作为编码器输入,并在高维空间中划分每个实例,促进了实例之间的特征交互,并显著提高了对复杂环境的建模能力;
-
为了更好地利用语义和几何信息,引入了一个鸟瞰图(BEV)增强模块,利用高阶统计信息来加强BEV特征;
-
HoMap在现有基准测试中显示出比最先进的技术(SOTAs)有显著优势,突显了我们方法的有效性
4.核心思想与方法
基于MapTR,提出了HoMap,这是一个端到端可训练的网络,使用环视摄像头图像作为输入来构建矢量化高清地图。与现有方法不同,HoMap在鸟瞰图视角转换和地图预测解码阶段都采用高阶统计数据来建模关系。这种方法在整个模型中融入了高阶建模,提高$了细节特征的表现。我们模型的整体架构如下图所示。该框架由两个主要部分组成:
鸟瞰图(BEV)特征提取器,其中包含BEV增强模块以及实例高阶解码器。具体来说,模型以多个摄像头的环视图像作为输入。首先,使用共享的卷积神经网络骨干模型提取图像特征。然后,使用GKT作为默认的转换模块,将这些特征转换为BEV表示。HoMap也兼容其他转换方法,如LSS 和 BEVFormer。得到的BEV特征表示为 ,其中C代表通道维度,H和W分别代表BEV地图的高度和宽度。接下来,BEV增强模块使用高阶统计数据来建模元素之间的关系,进一步细化BEV特征。增强后的BEV特征表示为 ,包含更详细的信息。这些增强的BEV特征随后与初始化的实例查询一起输入到实例高阶解码器中,该解码器由多层相同结构的层组成。最后一层的预测结果代表HoMap的最终结果。
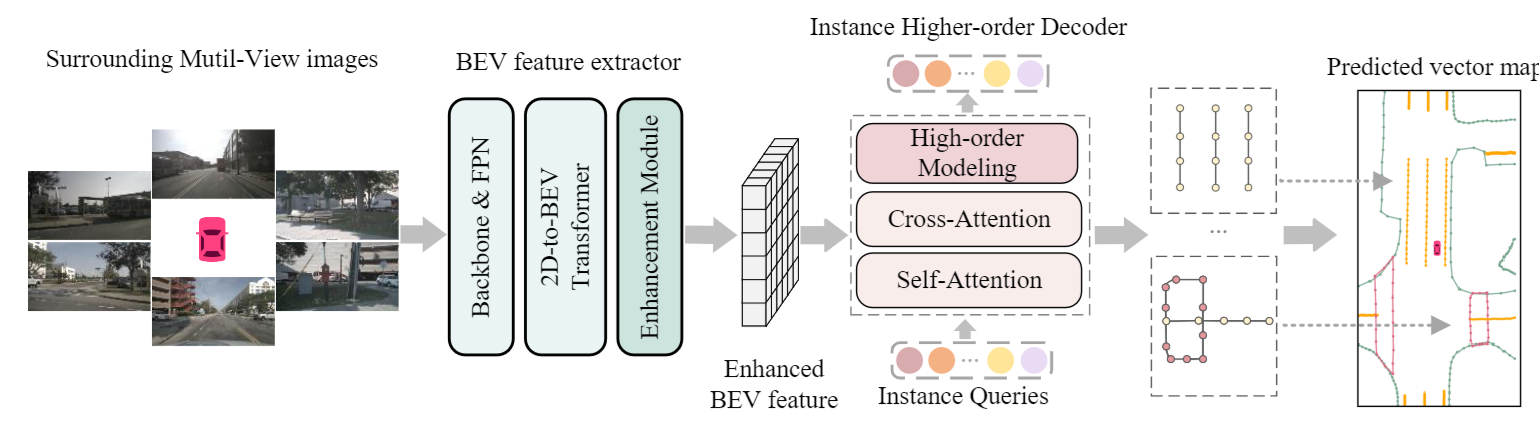
HoMap 架构
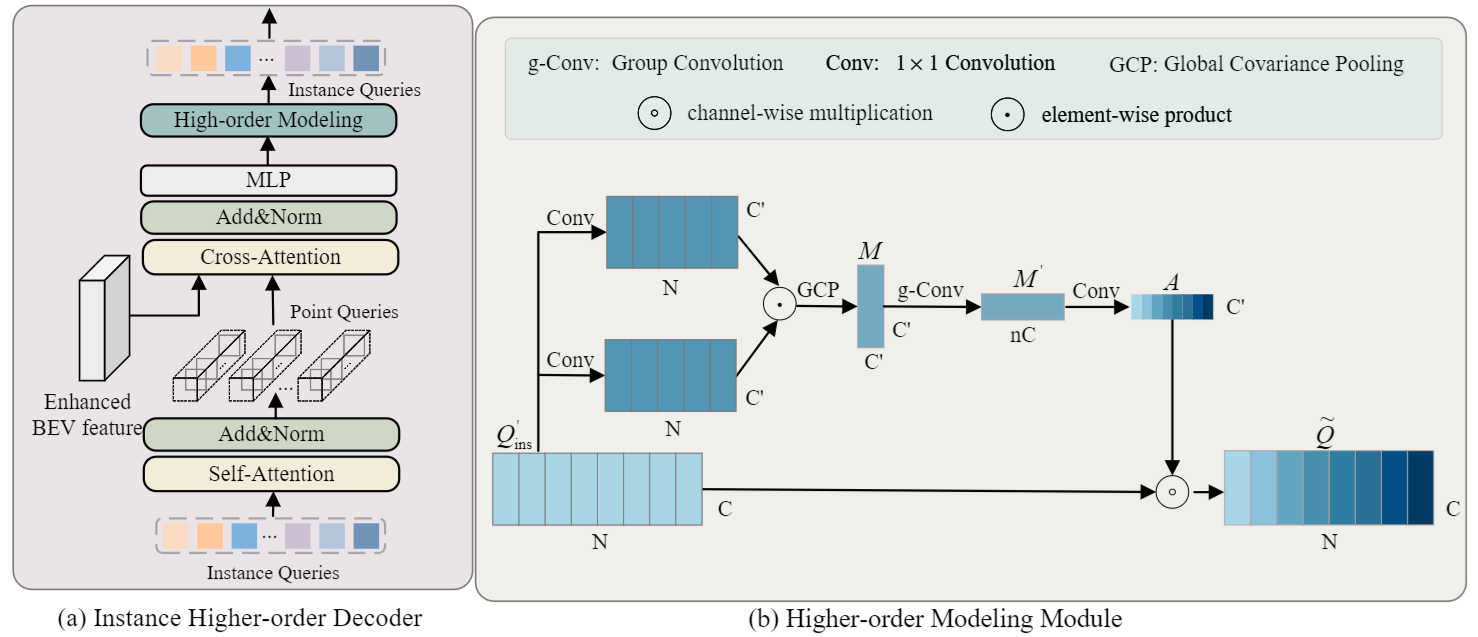
高阶解码器和高阶建模模块的实现
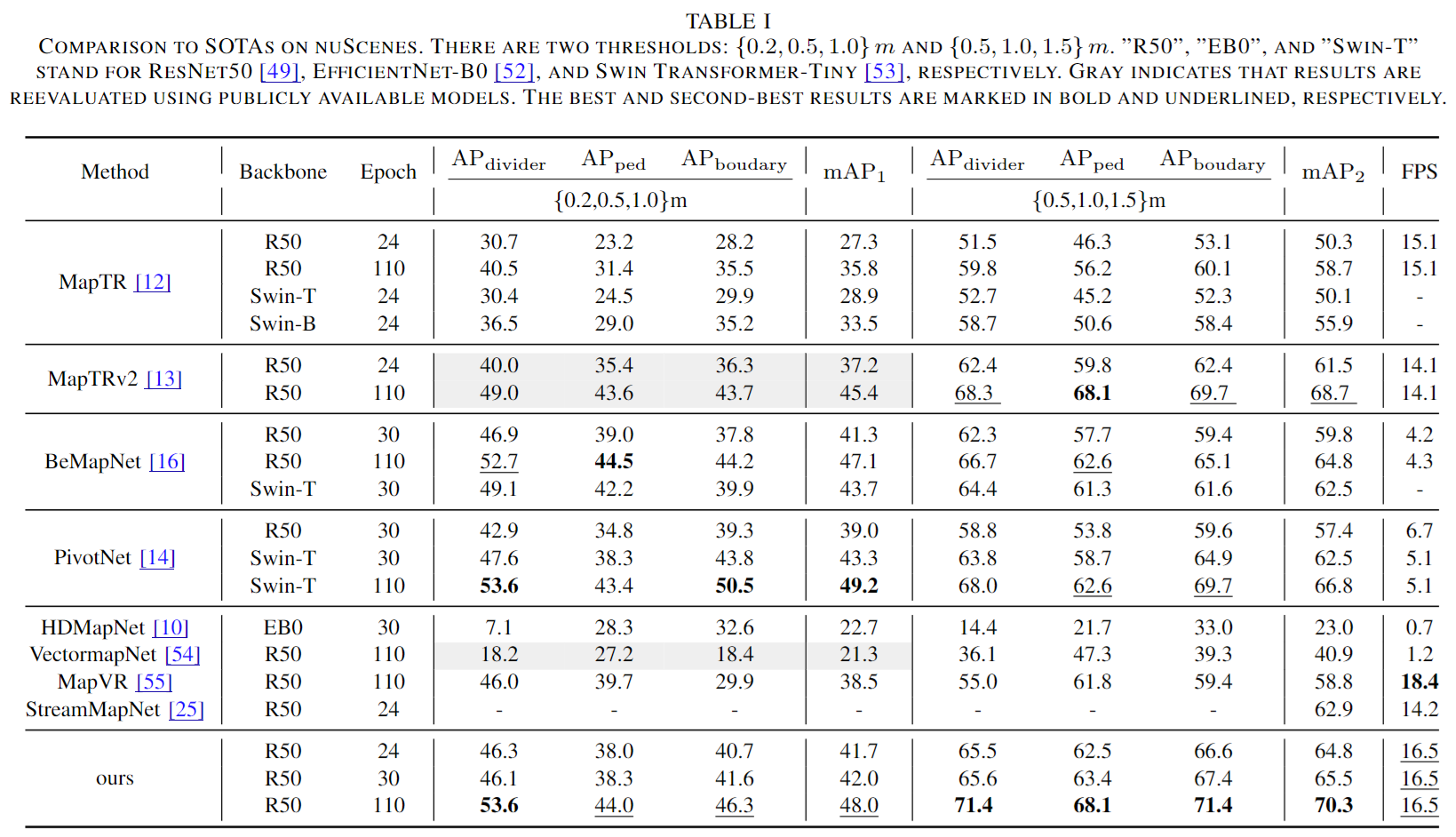
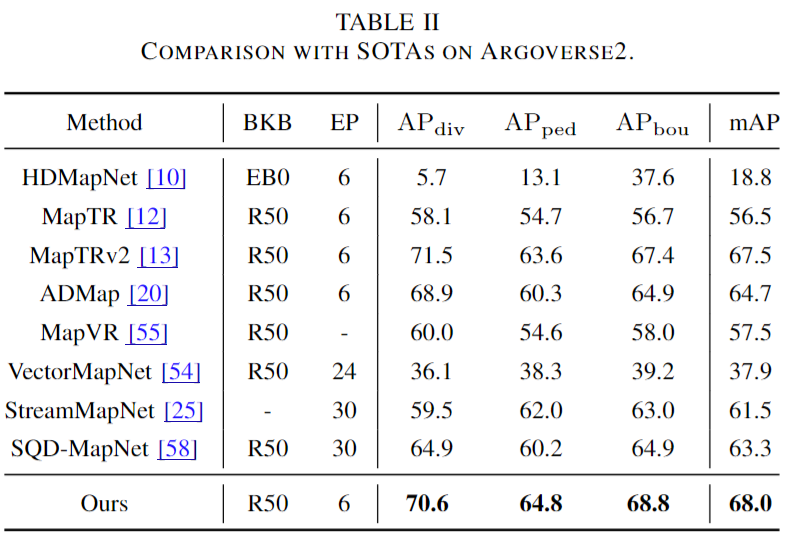
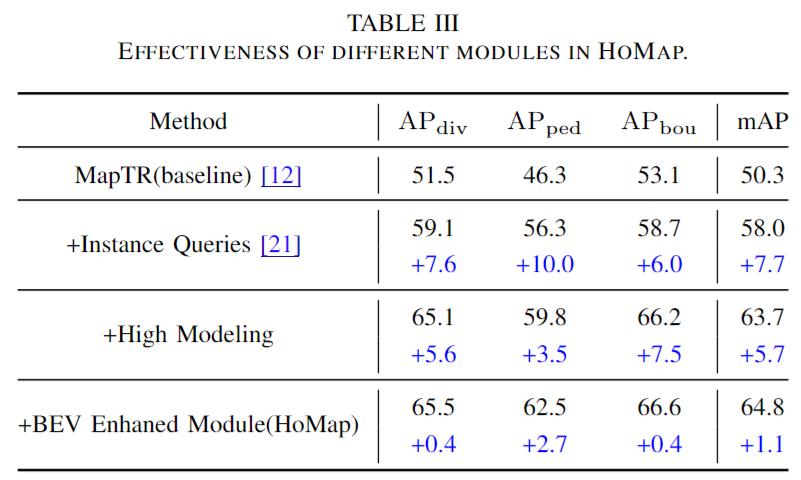
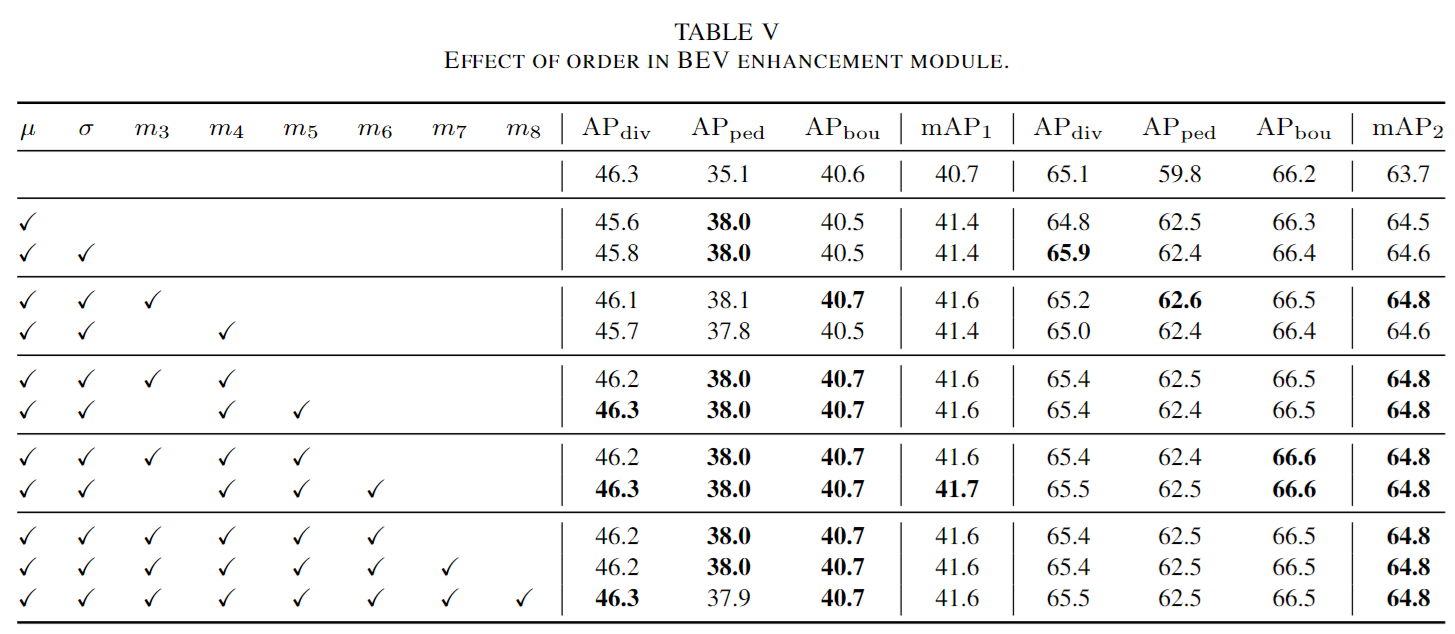
5.实验仿真验证
6.总结 & 展望
HoMap是一个高效的端到端框架,用于在线矢量化高清地图构建任务。通过引入高阶建模概念,HoMap丰富了鸟瞰图(BEV)特征,并使用高阶统计数据建模实例之间的关系,从早期的BEV特征提取开始,一直延续到解码器阶段。广泛的实验表明,HoMap在NuScenes和Argoverse2数据集上实现了最先进的性能,分别在平均精度均值(mAP)上超过了最先进的模型11.6和11.5个百分点。它能够准确捕捉复杂地图元素之间的关系。在未来,我们将继续探索模型在不同天气条件下,如降雪等驾驶场景中的性能表现。

本文仅做学术分享,如有侵权,请联系删文!
更多优质内容,请关注公众号:智驾机器人技术前线
















 842
842

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









