







SLAM系统前面大多是先估计相邻两帧之间相对位姿估计,接下来开始建图,然后根据建图结果对现有姿态进行优化,最后把当前这特征点填充进地图,且估计当前帧相对于世界坐标系下的位姿。
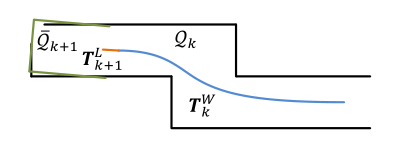
在扫描周期末尾激光雷达里程计输出畸变矫正过的点云 P k + 1 ^ \widehat{P_{k+1}} Pk+1 ,同时还有整个周期内每个点的姿态 T k + 1 L T_{k+1}^{L} Tk+1L。雷达建图过程是为了把 P k + 1 ^ \widehat{P_{k+1}} Pk+1 在世界坐标系下匹配。在得到相邻帧的姿态变换信息后,需要将其和全局地图进行匹配,并将其加入到全局地图中。
主要任务:
- 点云 P k + 1 {P_{k+1}} Pk+1去畸变,对齐到世界坐标系, Q k + 1 ^ \widehat{Q_{k+1}} Qk+1
- Q k + 1 ^ \widehat{Q_{k+1}} Qk+1 和 Q k Q_{k} Qk配准,优化位姿 T k + 1 W T_{k+1}^{W} Tk+1W
参数定义:
- k次扫描累积的地图点云集 Q k Q_{k} Qk
- 第k次扫描结尾,也是k+1帧 t k + 1 t_{k+1} tk+1地图上雷达的初始位姿 T k W T_{k}^{W} TkW
已知:累积的地图 Q k Q_{k} Qk,根据位姿投影的当前帧点云 Q k + 1 ^ \widehat{Q_{k+1}} Qk+1
,粗略的每个点云位姿 T k + 1 W T_{k+1}^{W} Tk+1W
输出:优化后精密的位姿 T k + 1 W T_{k+1}^{W} Tk+1W
方式:通过不断优化雷达位姿 T k + 1 W T_{k+1}^{W} Tk+1W将 Q k + 1 ^ \widehat{Q_{k+1}} Qk+1
和 Q k Q_{k} Qk匹配上。
利用里程计输出的位姿 T k + 1 L T_{k+1}^{L} Tk+1L,将 T k W T_{k}^{W} TkW不断补充 t k + 1 t_{k+1} tk+1到 t k + 2 t_{k+2} tk+2时间范围内雷达相对于世界坐标系的位姿,最终获得 T k + 1 W T_{k+1}^{W} Tk+1W.
将 P k + 1 ^ \widehat{P_{k+1}} Pk+1
通过粗略估计的位姿 T k + 1 W T_{k+1}^{W} Tk+1W投影到世界坐标系上,表示为 Q k + 1 ^ \widehat{Q_{k+1}} Qk+1
。
map-to-map通过不断匹配 Q k + 1 ^ \widehat{Q_{k+1}} Qk+1 和 Q k Q_{k} Qk优化位姿 T k + 1 W T_{k+1}^{W} Tk+1W,如果用上所有地图数据计算量很大,这里使用一个边长为10m的立方体替代全局地图。且 Q k + 1 ^ \widehat{Q_{k+1}} Qk+1 是10帧雷达扫描的数据,存入到KD-tree中。
在 Q k Q_{k} Qk中选取相邻点集合S,计算S的协方差矩阵M、特征向量E、特征值V。选取边缘线和平面块方式为:
边缘线:V中特征值一大两小,E中大特征值代表的特征向量代表边缘线的方向。
平面块:V中一小两大,E中小特征值对应的特征向量代表平面片的方向。
边缘线或平面块的位置通过穿过S的几何中心来确定。
这样就可以快速找到 Q k + 1 ^ \widehat{Q_{k+1}} Qk+1 中的点 i i i,和 Q k Q_{k} Qk中的边缘点 j , l {j,l} j,l以及平面点 j , l , m {j,l,m} j,l,m然后利用LM算法求解 T k + 1 W T_{k+1}^{W} Tk+1W。
代码讲解
首先介绍重要的参数。
//1.控制接收到的点云数据,每隔几帧处理一次
const int stackFrameNum = 1;
//控制处理得到的点云map,每隔几次publich给rviz显示
const int mapFrameNum = 5;
// 2.立方体cube变量
int laserCloudCenWidth = 10;// cube宽、高、深度
int laserCloudCenHeight = 5;
int laserCloudCenDepth = 10;
const int laserCloudWidth = 21;// 子cube沿宽、高、深度分割个数
const int laserCloudHeight = 11;
const int laserCloudDepth = 21;
const int laserCloudNum = laserCloudWidth * laserCloudHeight * laserCloudDepth;//子cube总数4851
//3.lidar视域范围内(FOV)的点云集索引
int laserCloudValidInd[125];
//lidar周围的点云集索引
int laserCloudSurroundInd[125];
// 4.pcl点云数据
//最新接收到的特征点(边缘+平面)
pcl::PointCloud<PointType>::Ptr laserCloudCornerLast(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr laserCloudSurfLast(new pcl::PointCloud<PointType>());
//存放当前收到的特征点 (下采样之后的)(in the local frame)
pcl::PointCloud<PointType>::Ptr laserCloudCornerStack(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr laserCloudSurfStack(new pcl::PointCloud<PointType>());
//存放当前收到的特征点(下采样之前的)
pcl::PointCloud<PointType>::Ptr laserCloudCornerStack2(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr laserCloudSurfStack2(new pcl::PointCloud<PointType>());
//原始点云坐标和权重
pcl::PointCloud<PointType>::Ptr laserCloudOri(new pcl::PointCloud<PointType>());
pcl::PointCloud<PointType>::Ptr coeffSel( 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1233
1233











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









