







 本文介绍了如何在安装并启动QGC后,连接仿真无人机进行起飞、设置各种选项(如Mavlink控台和传感器),以及使用虚拟手柄进行遥控操作和飞行日志管理。
本文介绍了如何在安装并启动QGC后,连接仿真无人机进行起飞、设置各种选项(如Mavlink控台和传感器),以及使用虚拟手柄进行遥控操作和飞行日志管理。
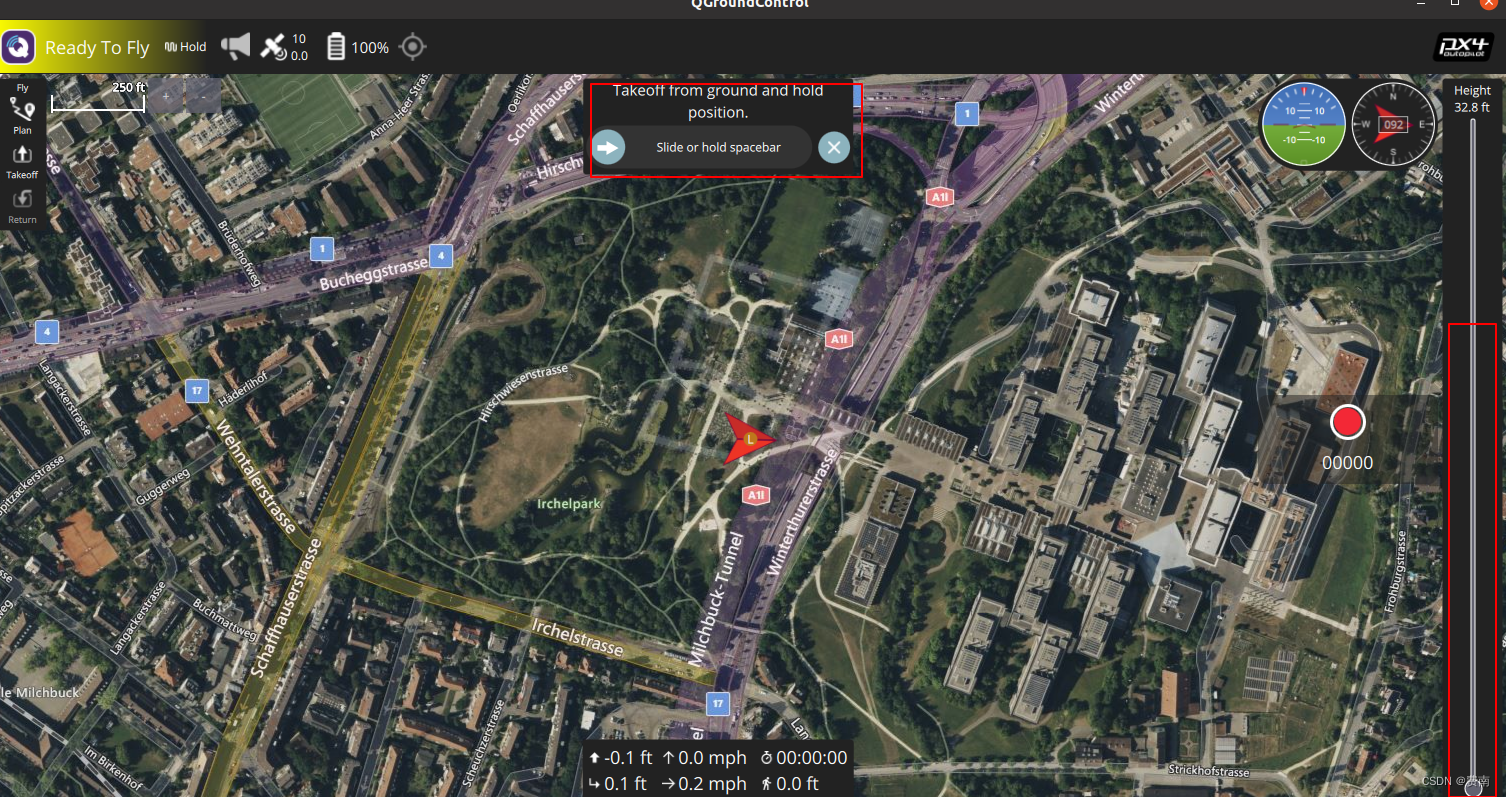
安装完成QGC后,打开gazebo,QGC将会自动链接上仿真无人机,点击左侧的takeoff,就可以起飞,如图所示,需要滑块来确认解锁,通过右边的来控制高度。
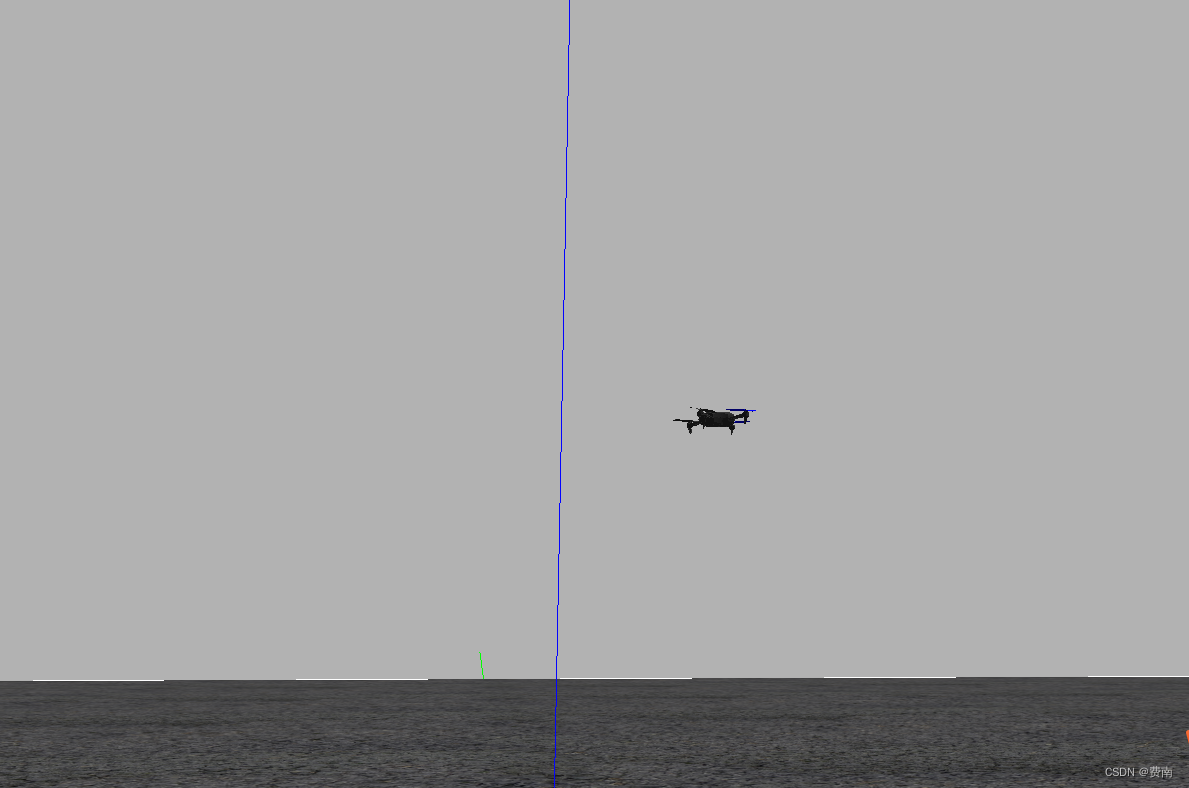
此时此刻的gazebo,开始起飞。
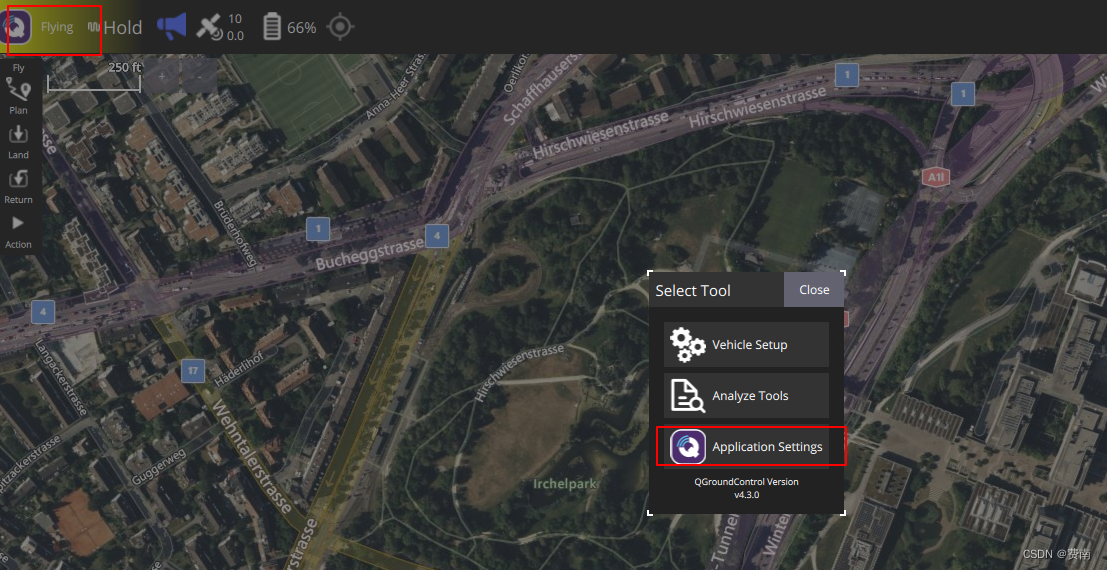
在QGC中可以点击左侧的Q图标,可以打开设置,这里面可以设置手动链接、多架无人机链接、Mavlink控台(这种无人机的通讯命令)、无人机的配置和调试、无人机的参数、各种传感器、无人机的飞行日志下载、等等内容。
在这里方便测试所以打开虚拟手柄功能,如图所示。

这样返回到控制台上,页面上会出现两个虚拟的手柄,这个手柄就是用来控制无人机的两个摇杆,类似于游戏机摇杆,摇杆是可以调的,美国手啥的不太懂这种翻译。
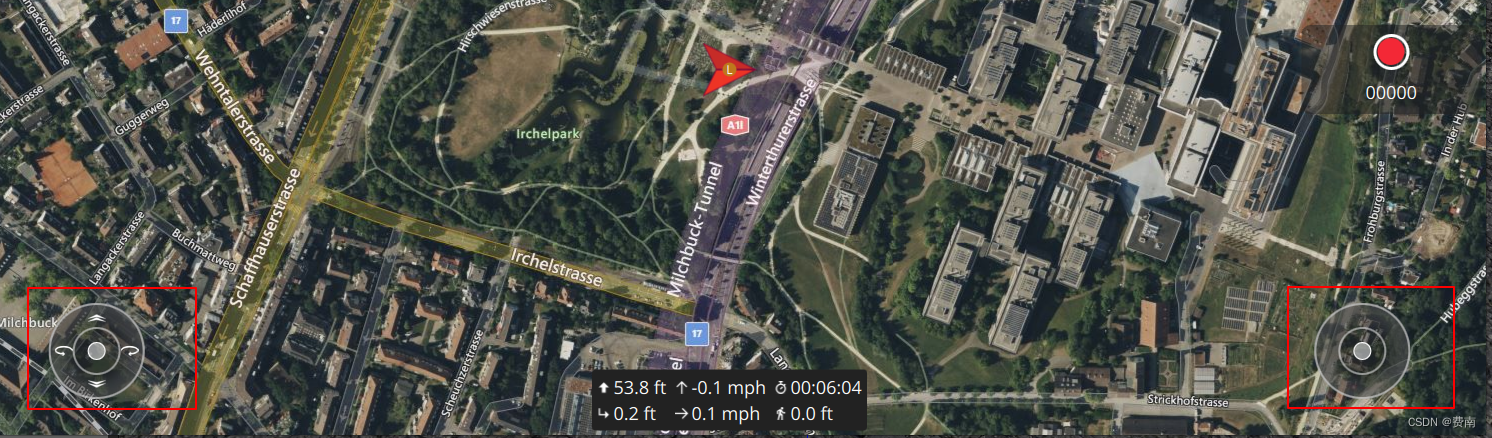
每一个对摇杆的操作将会反应在模拟器上,如图所示。

















 1035
1035

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









