






 本文介绍了差速驱动机器人在两个相邻时刻的位姿变化计算,包括左右轮移动距离、机器人圆弧运动半径的确定,以及基于此的机器人位移和圆弧半径的近似公式。通过几何关系和角速度与线速度的关系,得到机器人位移的数学表达式,为里程计计算提供基础。
本文介绍了差速驱动机器人在两个相邻时刻的位姿变化计算,包括左右轮移动距离、机器人圆弧运动半径的确定,以及基于此的机器人位移和圆弧半径的近似公式。通过几何关系和角速度与线速度的关系,得到机器人位移的数学表达式,为里程计计算提供基础。
最近做一个机器人采用差速驱动的原理,故总结一下关于差速驱动相关计算。
下图是移动机器人在两个相邻时刻的位姿,其中是两相邻时刻移动机器人绕圆弧运动的角度,
是两相邻时刻移动机器航向角(朝向角head)的变化量。Ldist(Vl*△t)表示左轮移动距离,Rdist(Vr*△t)代表右轮移动的距离,d是右轮比左轮多走的距离,
是左右轮之间的间距。
是移动机器人圆弧运动的半径
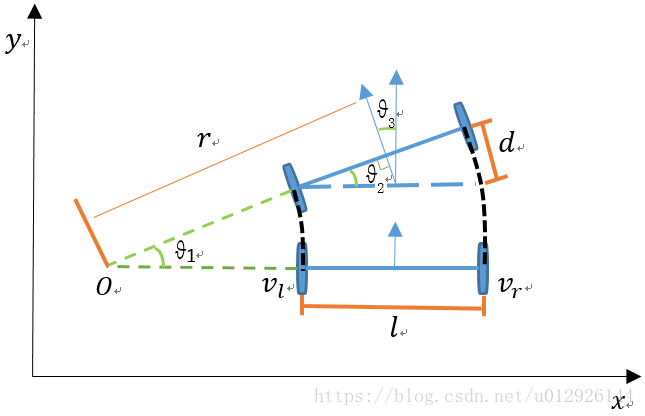
移动机器人前进速度等于左右轮速度的平均

最近做一个机器人采用差速驱动的原理,故总结一下关于差速驱动相关计算。
下图是移动机器人在两个相邻时刻的位姿,其中是两相邻时刻移动机器人绕圆弧运动的角度,
是两相邻时刻移动机器航向角(朝向角head)的变化量。Ldist(Vl*△t)表示左轮移动距离,Rdist(Vr*△t)代表右轮移动的距离,d是右轮比左轮多走的距离,
是左右轮之间的间距。
是移动机器人圆弧运动的半径
移动机器人前进速度等于左右轮速度的平均
 516
718
516
718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























