







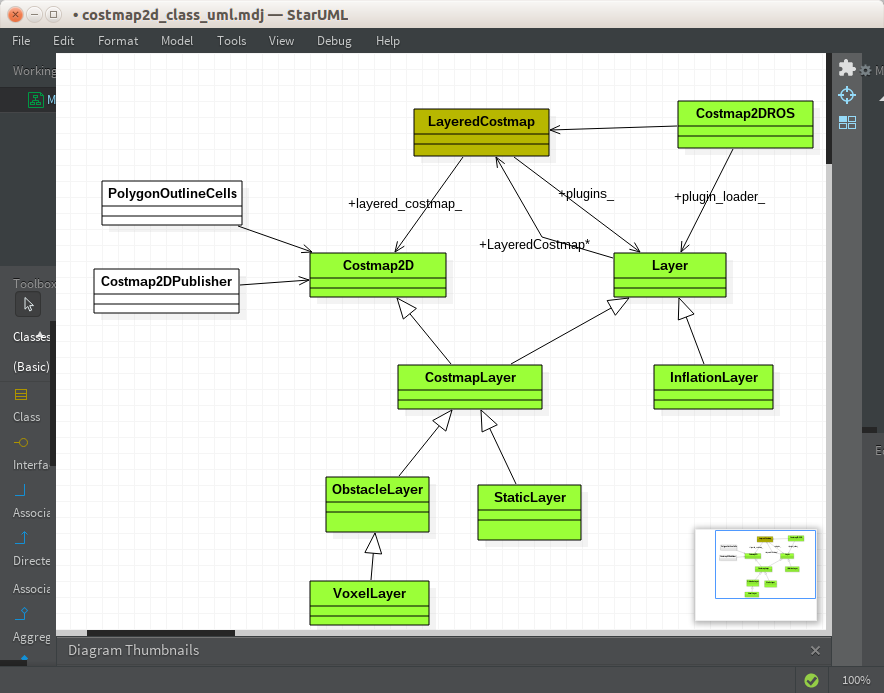
 本文深入剖析了ROS navigation stack中的costmap_2d组件,特别是LayeredCostmap类。内容包括构造函数、析构函数、地图大小的重新分配、静态地图与障碍物地图的更新过程,以及如何处理实时性和机器人尺寸计算。通过对各个插件层的操作,如StaticLayer、ObstacleLayer和InflationLayer,揭示了costmap_2d如何构建和维护机器人的导航地图。
本文深入剖析了ROS navigation stack中的costmap_2d组件,特别是LayeredCostmap类。内容包括构造函数、析构函数、地图大小的重新分配、静态地图与障碍物地图的更新过程,以及如何处理实时性和机器人尺寸计算。通过对各个插件层的操作,如StaticLayer、ObstacleLayer和InflationLayer,揭示了costmap_2d如何构建和维护机器人的导航地图。
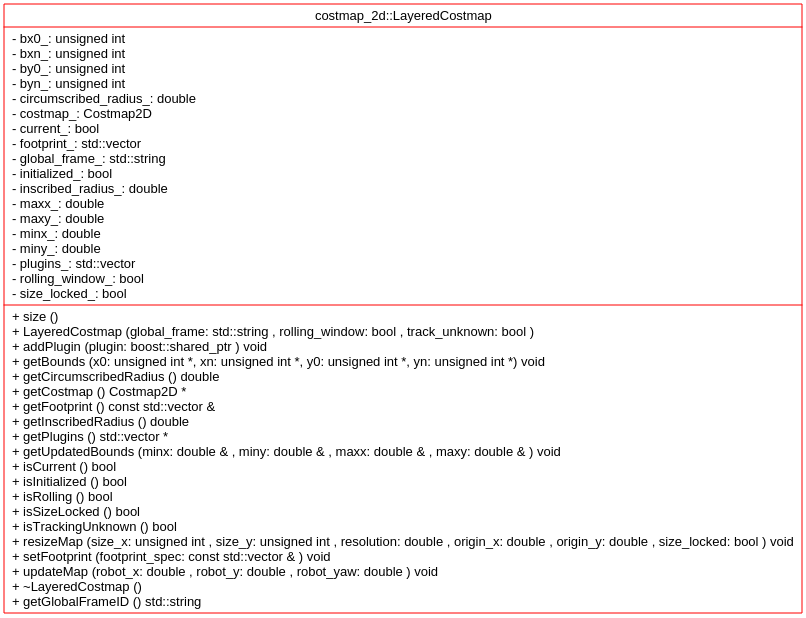
在数据成员中,有两个重要的变量:Costmap2D costmap_; 和 std::vector<boost::shared_ptr<Layer> > plugins_; 。
这个类相对比较简单,首先来看构造函数:
LayeredCostmap::LayeredCostmap(std::string global_frame, bool rolling_window, bool track_unknown) :
costmap_(), global_frame_(global_frame), rolling_window_(rolling_window), initialized_(false), size_locked_(false)
{
if (track_unknown)
costmap_.setDefaultValue(255);
else
costmap_.setDefaultValue(0);
}
调用costmap_ 的setDefaultValue 方法,实际上设定了类costmap_2d 的一个成员变量default_value_ 这个值在class costmap_2d 中是这样使用的:memset(costmap_, default_value_, size_x_ * size_y_ * sizeof(unsigned char)); 实际存储地图的变量就是class costmap_2d 的 costmap_ 数据成员。
析构函数中,所有的操作就是弹出plugin: plugins_.pop_back(); 。
函数LayeredCostmap::resizeMap 就是给class costmap_2d 的 costmap_ 成员的大小重新做分配。然后根据plugin对每一层的地图调用其父类Costmap2D成员的initial 方法,实际效果就是将plugin所指向的每一层地图的大小都设置为和LayeredCostmap::costmap_ 数据成员一样的空间大小。
{
size_locked_ = size_locked;
costmap_.resizeMap(size_x, size_y, resolution, origin_x, origin_y);
for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins_.begin(); plugin != plugins_.end();
++plugin)
{
(*plugin)->matchSize();
}
}函数 LayeredCostmap::updateMap 完成对每一层地图的更新,更新过程分为两步updateBounds和updateCosts:
void LayeredCostmap::updateMap(double robot_x, double robot_y, double robot_yaw)
{
if (rolling_window_)
{
double new_origin_x = robot_x - costmap_.getSizeInMetersX() / 2;
double new_origin_y = robot_y - costmap_.getSizeInMetersY() / 2;
costmap_.updateOrigin(new_origin_x, new_origin_y);
}
if (plugins_.size() == 0)
return;
minx_ = miny_ = 1e30;
maxx_ = maxy_ = - 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6708
6708

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









