







第一个应用程序
此部分对应教程原文
http://ardupilot.org/dev/docs/learning-ardupilot-the-example-sketches.html
HelloWorld
代码编写及编译
学习任何一种平台都从Hello World开始。由于官方教程中的方法有一些问题,因此在这里详细写一下如何在Pixhawk中运行helloworld程序。
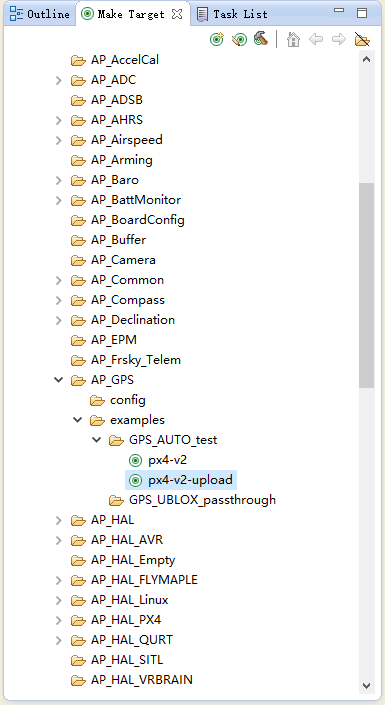
在eclipse左侧的 project explorer中,打开ardupilot | libraries | AP_GPS | examples | GPS_AUTO_test文件夹,双击里面的GPS_AUTO_test.cpp文件。
这个文件的主要功能是打印出GPS信息到控制台上。
当然,作为初学者,我们更关心怎么打印hello world到屏幕上(毕竟GPS模块不是谁都有的)。所以我们先对代码做如下改动:
#include <AP_HAL/AP_HAL.h>
const AP_HAL::HAL& hal = AP_HAL::get_HAL();
void setup() {
hal.console->println("GPS AUTO library test");
}
void loop()
{
hal.console->println("hello world!");
hal.scheduler->delay(1000);
}
AP_HAL_MAIN();如果你熟悉arduino开发的话,你一定对上面的代码很眼熟。
没错,apm组织代码的形式和arduino是一样的。一个setup()函数,一个loop()函数,当pixhawk通电后,系统会先执行一次setup(),再循环执行loop()直到断电。
然而经过我的测试上面的代码是不能直接运行的(Linux和Windows下编译后烧录到板子上均无反应)。需要将上面的代码改为下面的代码才能正常打印
#include <AP_HAL/AP_HAL.h>
const AP_HAL::HAL& hal = AP_HAL::get_HAL();
class GPS_AUTO_test: public AP_HAL::HAL::Callbacks{
public:
void setup()
{
hal.console->println("GPS AUTO library test");
}
void loop()
{
hal.console->println("hello world!");
hal.scheduler->delay(1000);
}
};
GPS_AUTO_test gat;
// Register above functions in HAL board level
AP_HAL_MAIN_CALLBACKS(&gat);
区别在于在第二段代码中我们把setup()函数和loop()函数封装在了一个类里。这个类必须继承AP_HAL::HAL::Callbacks并重载setup和loop函数。烧录后可正常运行。
编者注:此处编者阅读了AP_HAL_MAIN和AP_HAL_MAIN_CALLBACKS两个宏,发现两个宏都是没有错误的,尚不清楚为何第一种宏编译后无法运行。
改完后就是编译了。在Eclipse右侧的Make Target选项卡上找到我们的当前目录ardupilot | libraries | AP_GPS | examples | GPS_AUTO_test,单击上面的绿色加号,输入px4-v2-upload,之后双击生成的绿色图标,编译开始。
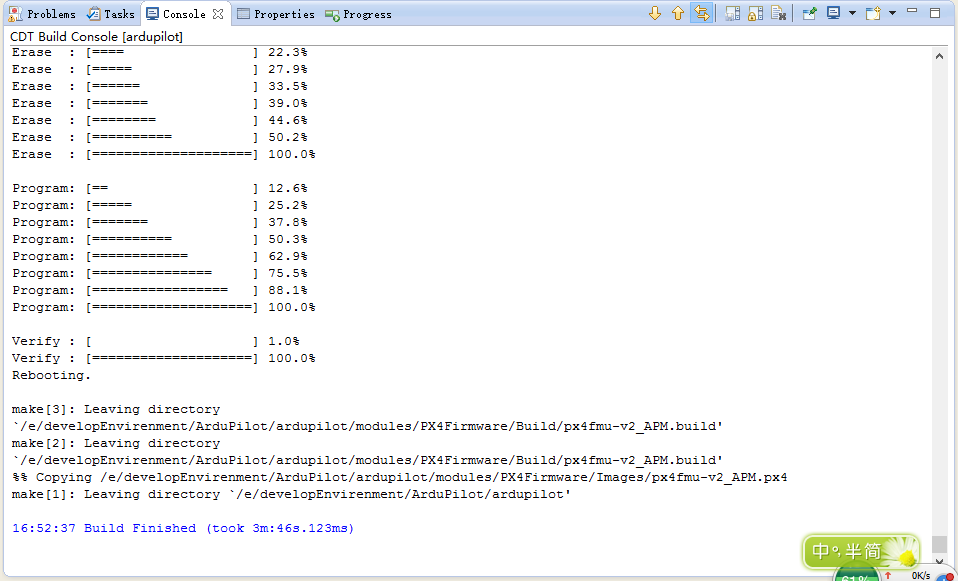
注:apm采用增量编译的形式,初次编译时间很长,而第二次编译时仅重新编译修改过的部分。因此请耐心等待。
编译完成时,会提示
If the board does not respond within 1-2 seconds, unplug and re-plug the USB connector.
此时请将pixhawk板通过USB线连接到电脑上。系统会自动擦除原先的代码,并烧录进新的代码。
运行代码
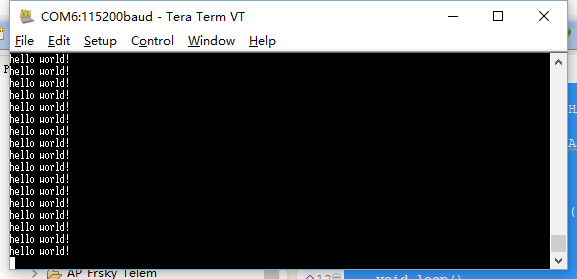
打开px4-toolchain中的teraTerm软件。依次选择Setup | serial port。在打开的选项板中设置Baud rate为115200,其与保持默认,单击OK即可连接上。
编者注:TeraTerm为一个串口监视器,你可以选用任何你喜欢的串口监视器来执行程序。
此时可以看到屏幕上打出一堆hello world!
其他细节
到了这里,我们已经完成了环境的搭建,以及简单地编译和运行程序。使用eclipse强大的代码阅读能力可以帮助我们迅速的定位每一个函数的定义位置,将鼠标光标定位到函数处,即可出现该函数定义。在此处按下F3即可打开相应的定义文件。
这里我们简单介绍一下宏AP_HAL_MAIN_CALLBACKS。
该宏展开后代码如下:
#define AP_HAL_MAIN_CALLBACKS(CALLBACKS) extern "C" { \
int AP_MAIN(int argc, char* const argv[]); \
int AP_MAIN(int argc, char* const argv[]) { \
hal.run(argc, argv, CALLBACKS); \
return 0; \
} \
}这段宏相当于定义了我们熟悉的main函数。进入main函数后,迅速将控制权转移给hal.run这个函数,并将我们实现的类的实例传给hal.run。这也是所有基于APM开发的程序的共同入口。
如果你想继续阅读关于hal.run的函数,可以继续往里跳转,直到解决了你所有疑惑为止。但是作为初学,我们还是更关心一些顶层的实现(如姿态、位置、EKF等)。硬件底层的实现细节可以在对代码有整体把握后再往下深挖。
在读到这里以后我们就可以读官方文档了。(注意把每一个教程里的setup和loop函数封装到类里)。在这里我们引用一个别人已经翻译好的文档,此部分内容不再赘述。
http://blog.csdn.net/linuxarmsummary/article/details/45402891
依次阅读该文档中的pixhawk源码笔记一二三四五六七八九十。该文档较老,如遇到和本博不一样的地方以本博客为准。















 101
101











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









