







文章目录
1 基本命令
📁workspace(ROS的工作空间)
├── 📁build(在工作空间中执行catkin_make时,会在build中创建一系列的中间编译文件和中间缓存文件)
├── 📁devel(用于存储编译成功的目标可执行文件)
│ ├── 📃setup.bash
└── 📁src(用于存储新创建的程序包)
├── 📃CMakeLists.txt
├── 📁pkg1
│ ├── 📃CMakeLists.txt
│ ├── 📁include
│ ├── 📃package.xml
│ └── 📁src
├── 📁pkg2
│ ├── 📃CMakeLists.txt
│ ├── 📁include
│ ├── 📃package.xml
│ └── 📁src
└── 📁pkg3
├── 📃CMakeLists.txt
├── 📁include
├── 📃package.xml
└── 📁src
1.1 roscore 启动
# 1.启动ROS Master
roscore
# 2.启动小海龟仿真器
rosrun turtlesim turtlesim_node
# 3.启动海龟控制节点
rosrun turtlesim turtle_teleop_key
1.2 rqt_graph 系统中计算图
- 可以清晰地了解系统节点间通信的部分信息。
- teleop_turtle节点(键盘控制节点)通过cmd_vel(topic)向turtlesim节点(海归仿真器节点)发出消息,使得小海龟移动。
rqt_graph # 查看系统中的计算图
1.3 rosnode 节点
# 显示节点列表
rosnode list
# 查看节点的具体信息
rosnode info /节点名
1.4 rostopic 话题
# 显示topic列表
rostopic list
# 手动发布数据给topic
# rostopic pub (参数) 话题名 消息数据结构 “具体数据”
rostopic pub -r 5 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
1.5 rosmsg 消息数据结构
# 查看消息数据结构
rosmsg show geometry_msgs/Twist
1.6 rosservice 服务
# 查看服务列表
rosservice list
# 在服务列表中,有个/spawn服务,可以产生一只新的海龟
rosservice call (参数) 服务名 “具体数据”
1.7 rosbag 记录
试想我们尝试让海龟以我们指定的路径移动了一回,我们想要把它记录下来,拷贝到自己的实验室再复现出来,我们就可以使用话题记录功能。
# 比如我们使用之前打开的键盘操作器让海龟移动一圈并记录下来:
rosbag record -a -O 文件名
重新开启roscore,开启海龟节点rosrun turtlesim turtlesim_node
# 复现之前的移动
rosbag play cmd_record
2 创建工作空间和编译功能包
工作空间(Workspace):存放工程开发相关文件的文件夹。类似一个IDE(例如Pycharm)新建一个工程,就是一个工作空间。包含4个文件夹:
- src:代码空间(Source Space):放置功能包代码
- build:编译空间(Build Space):编译过程中产生的中间文件,不用过多关注
- devel:开发空间(Development Space):放置编译生成的可执行文件、库、脚本
- install:安装空间(Install Space):存放可执行文件,与上面有一定重复
2.1 创建工作空间
mkdir catkin_ws # 主目录下创建工作文件夹
cd catkin_ws
mkdir src # 创建代码编译空间
cd src
mkdir -p ~/catkin_ws/src # -p 意为递归创建目录,即直接创建多级目录
catkin_init_workspace # 当前文件夹初始化,变成ros工作空间
cd .. # 回到catkin_ws目录
catkin_make # 编译ros,生成对应文件夹
# 可以看到生成了build和devel两个新文件夹,devel存放了编译完成的内容。
# 生成install文件夹
catkin_make install # 产生install工作空间(可写可不写)
# 每次都使用catkin_make的话效率十分低下,因为这种编译方法会编译工作空间下的所有的包
cd ~/catkin_ws/
catkin_make -DCATKIN_WHITELIST_PACKAGES=" beginner_tutorials"
# 如果需要编译两个或者多个只需要中间加分号即可:
catkin_make -DCATKIN_WHITELIST_PACKAGES="pkg1; pkg2",
2.2 创建功能包
- 功能包是放置ROS源码的最小单元。
- 上面我们创建了一个空的workspace(ROS的工作空间),src文件夹里面没写东西,现在我们创建一个自己的功能包。
- 注意:同一工作空间下,不允许存在同名功能包;不同工作空间下,允许存在同名功能包。
cd ~/catkin_ws/src
catkin_create_pkg test_pkg std_msgs rospy roscpp
# catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
# <package_name>为包名
# [depend]为依赖,即指明编译的时候需要ROS中的其他功能包,如需要调用python、C++库,就要指明rospy、roscpp。
2.3 设置和检查环境变量
# 方案一:环境变量只适用于当前终端
source devel/setup.bash
source ~/.bash
# 方案二:适应于整个计算机
echo "source ~/tutorial_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
# 检查环境变量:
echo $ROS_PACKAGE_PATH:
# 输出:/home/tom/catkin_ws/src:/opt/ros/noetic/share
- 运行ros的py文件出现的问题:
# 问题一:提示错误:/usr/bin/env: “python”: 没有那个文件或目录
#!/usr/bin/env python3
# 问题二:python文件中出现汉语注释时,需要在文件头部添加:
# -*- coding: utf-8 -*-
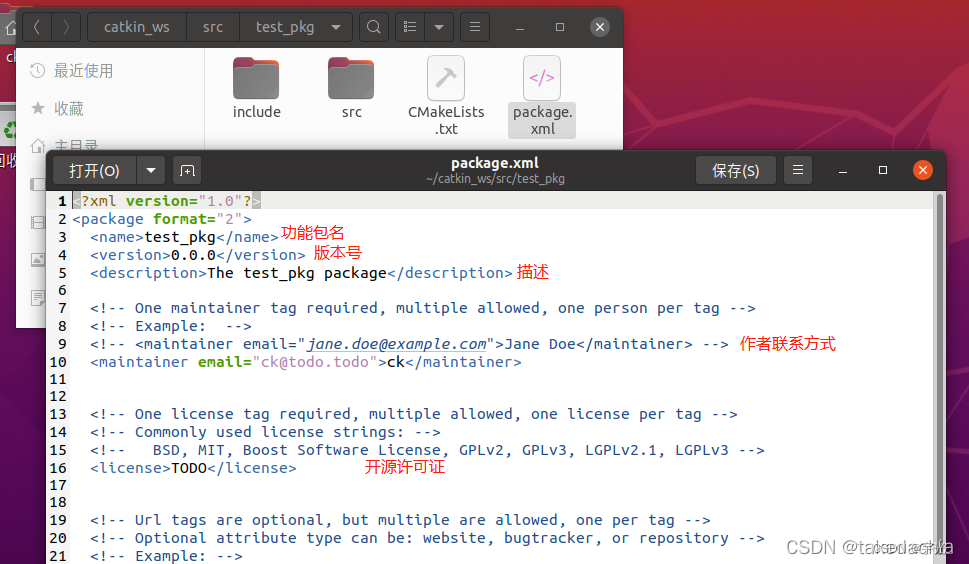
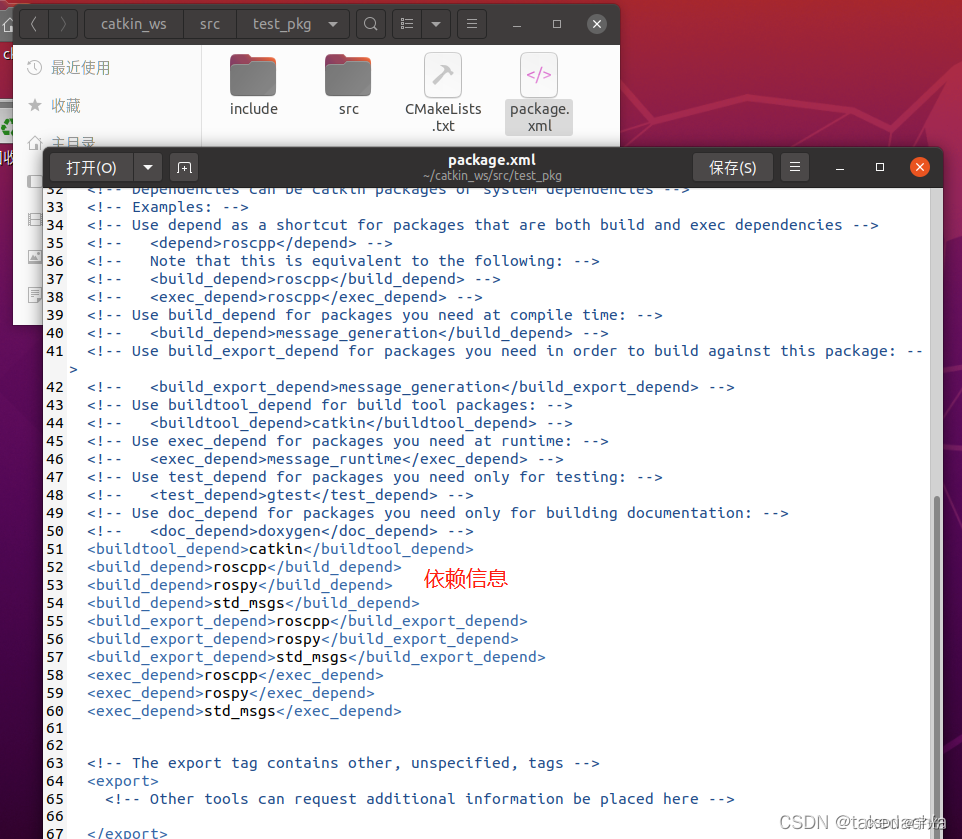
2.4 功能包中的两个重要文件
2.4.1 package.xml
- 使用xml语言描述功能包相关的信息:
2.4.2 CMakeLists.txt
- 描述功能包里的编译规则,使用CMake语法。

3 ROS安装问题
3.1 依赖问题
下列软件包有未满足的依赖关系:
ros-noetic-desktop-full : 依赖: ros-noetic-desktop 但是它将不会被安装
依赖: ros-noetic-perception 但是它将不会被安装
依赖: ros-noetic-simulators 但是它将不会被安装
依赖: ros-noetic-urdf-sim-tutorial 但是它将不会被安装
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
apt install libcupsimage2=2.2.10-6+deb10u1
正在读取软件包列表... 完成
正在分析软件包的依赖关系树
正在读取状态信息... 完成
有一些软件包无法被安装。如果您用的是 unstable 发行版,这也许是
因为系统无法达到您要求的状态造成的。该版本中可能会有一些您需要的软件
包尚未被创建或是它们已被从新到(Incoming)目录移出。
下列信息可能会对解决问题有所帮助:
下列软件包有未满足的依赖关系:
libcupsimage2 : 依赖: libcups2 (= 2.2.10-6+deb10u1) 但是 2.3.0+deepin2-1+deepin 正要被安装
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
# 安装:
apt install libcups2=2.2.10-6+deb10u1
# 再安装:
apt install libcups2-dev
根据报错,一路安装下去,我的是最后会有一个依赖项的保本过高,我降级了之后就能够安装了 下列软件包有未满足的依赖关系: libgpgme-dev : 依赖: libgpgme11 (= 1.10.0-1ubuntu2) 但是 1.10.0-1ubuntu2.1 正要被安装
3.1.1 rosdep(安装系统依赖)
-
rosdep是ros一个命令行工具,用于安装系统依赖,具体地说,就是ros包的依赖。
rosdep的安装
- rosdep可以使用apt或pip进行安装
- 建议使用apt进行安装,使用apt安装后rosdep可以自动地更新
- 对于不同版本的ros,使用apt安装方法如下:
# ROS Noetic
sudo apt-get install python3-rosdep
# ROS Melodic and earlier
sudo apt-get install python-rosdep
- 也可以使用源代码安装rosdep,安装方法如下:(假设源代码被clone到了rosdep目录下)
git clone https://github.com/ros-infrastructure/rosdep
cd rosdep
source setup.sh
rosdep的初始化
- 安装或更新完rosdep后需要使用下面的命令初始化
- 注意:rosdep update命令前不能加sudo
sudo rosdep init
rosdep update
rosdep的使用
- rosdep和catkin一样都可以用来构建ros包,使用方法如下:
rosdep install PACKAGE_NAME
- rosdep的主要用途是安装工作空间中ros包的依赖,首先切换到工作空间下,然后运行下述命令即可安装该工作空间的所有依赖:
rosdep install --from-paths src --ignore-src -r -y
















 539
539











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











