






 本文分享了作者在巩固江科大课程知识过程中,学习和实践STM32平衡车开发的历程,包括电路设计、编码电机控制、MPU6050姿态解算、PID算法应用、PCB设计错误与修正,以及算法编写和调试的经验和教训。
本文分享了作者在巩固江科大课程知识过程中,学习和实践STM32平衡车开发的历程,包括电路设计、编码电机控制、MPU6050姿态解算、PID算法应用、PCB设计错误与修正,以及算法编写和调试的经验和教训。
#在学完江科大的课程之后,想巩固一下相关知识点并学习相关的算法#
在开发的过程中我遇到了非常多的麻烦,汲取了许多的教训,希望这篇文章对你有所帮助
目录
2.blancecar_pid.c PID算法(有一些float可以换成int16_t)
下面是我学习过的几个相关视频:
1.原理图和PCB绘制:【教程】零基础入门PCB设计-国一学长带你学立创EDA专业版 全程保姆级教学 中文字幕(持续更新中)_哔哩哔哩_bilibili
2.JDY-31蓝牙模式:
3.STM32平衡车(材料购买可以看这里):
草履虫都能学会的STM32平衡小车教程(基础篇)_哔哩哔哩_bilibili
4.PID算法:
5.PID调参:
【平衡小车PID】直立环+速度环完整调参过程 (开源)_哔哩哔哩_bilibili
6.陀螺仪算法(这个我学不会):
互补滤波姿态估计、卡尔曼滤波姿态、高度估计_哔哩哔哩_bilibili
7.vofa(串口调试工具,我主要是用来看陀螺仪是否准确的):
STM32F4使用DMA串口通信连接VOFA软件进行电机调试和波形显示_哔哩哔哩_bilibili
8.MPU6050DMP库移植(由于姿态算法学不会,所以选择直接用别人的代码):
[小学生都会的]MPU6050DMP库移植(stm32标准库)_哔哩哔哩_bilibili
前期准备
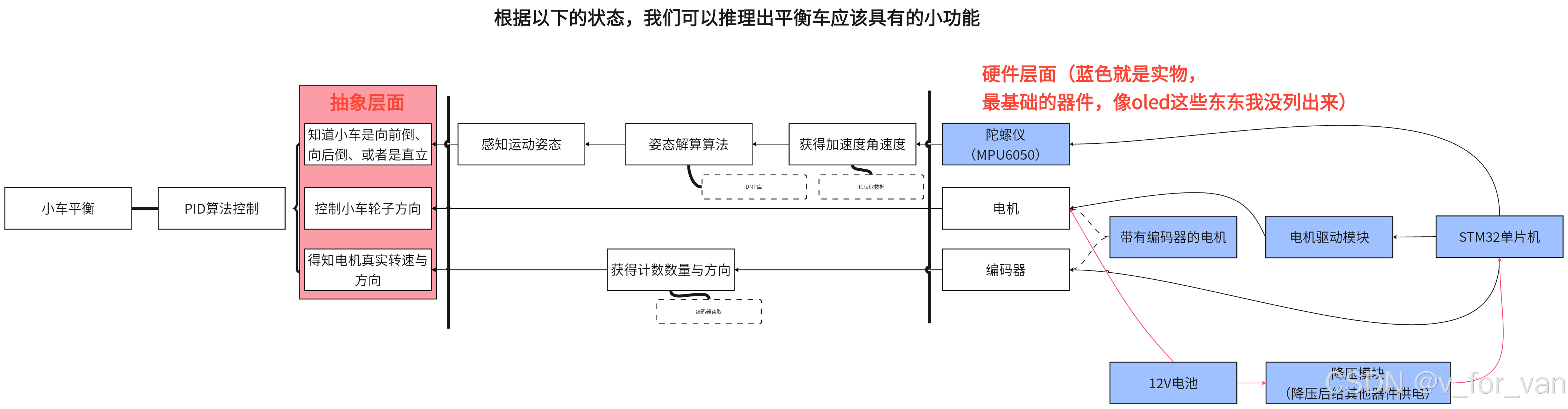
平衡车平衡的基本原理

平衡车基本功能分析
材料
在学习之前我们先要进行材料的准备,了解一下平衡车需要用到的模块,和其他零部件:
1.江科大套件自带:TB6612、STM32F103C8T6最小系统板、OLED、MPU6050
2.需另外购买:两个带编码器的电机(我用的是25GA370)、JDY-31(蓝牙模块)、12v电池、MP1584(12V转5V)、超声波模块(这个我买了,但是没用到)购买的细节,或者其他零件如亚克力板,螺丝,排母,开关等可以看上面的视频
一、几个模块的进阶学习
因为之后我们要进行程序框架的编写,所以我们以下要先学习一些新的内容
1.编码电机
编码电机比我们之前用过的电机多了四个引脚,其中两个引脚连接编码器的电源,另外两个引脚分别输出编码器的波形,跟我们之前学过的旋转编码器输出的波形是一样的

2.MPU6050姿态解算
我主要是通过积分角速度和读取加速度的分量来获取当前角度,这个姿态解算我并不能写出一个比较好的算法,老是有些偏移,想继续深入学习但是碰到了数学上的瓶颈,所以我选择了移植DMP库(上面有视频链接)
3.JDY-31(我买的是四角的)
这个主要是串口通讯,把USB转串口的代码搬过来修改一下即可,之后通过商家的进行简单的调试,这里不进行过多赘述。但是在手机调试蓝牙的时候老是找不到软件,所以在我给大家推荐一个比较好用的蓝牙调试软件,叫E调试(手机自带的应用商城应该都能找得到)


4.PID算法
先了解一下PID算法的运用场景和原理,得知为什么平衡车需要PID,学习PID算法的简单表达式
(具体可以观看上面的视频)
二、电路设计
学习完这些之后,我们要对几个模块进行组合(可以参考一下江科大的接线图,遇到冲突的时候要切换别的接口),在接口正确的前提下尽量使接线更为简单,减少之后PCB绘制的工作量。或者在程序写完之后,先让基本零部件跑起来,之后再对线路进行整改

三、编写程序框架
下面是我画的简易版流程图,希望对大家有所帮助,我的代码框架就是依据此图写出来的

这里要注意单片机资源的分配,如TIMER资源
下面我只呈现几个重要的函数,其他函数可以参考江科大,或者上面的视频
1.main.c引用的函数
#include "stm32f10x.h"// Device header
#include "Delay.h"
#include "oled.h"
#include "mpu6050.h" //MPU6050驱动
#include "inv_mpu.h" //MPU6050姿态解算库(如何安装参考上面的视频)
#include "timer.h" //中断TIM3(中断任务)
#include "Serial.h" //串口(主要用于蓝牙模块的控制)
#include "Encoder.h"//译码器TIM2 TIM4(用于读取电机转速和转向)
#include "motor.h" //PWM TIM1(用于电机转速控制)
#include "blancecar_pid.h"//PID算法
其中Delay为了适配DMP做了一些修改,其中还进行了DMP库的移植(具体看上面的视频)
2.blancecar_pid.c PID算法(有一些float可以换成int16_t)
#include "stm32f10x.h" // Device header
float zl_Kp,zl_Kd; //直立环
float zl_error,zl_measure_last=0,zl_difference; //直立环:误差,测量,上次测量,两次测量的差
float sd_Kp,sd_Ki; //速度环
float sd_error,sd_error_last=0,sd_sum=0,sd_difference,sd_filt;//速度环:误差,上次误差,积分,两次测量的差,权重
float zx_Kp,zx_Kd; //转向环
float zx_error,zx_measure_last=0,zx_difference; //转向环:误差,测量,上次测量,两次测量的差
//经过测量陀螺仪roll中值为-3
void Limit(int16_t Date) //限制值的大小,必免积分过大影响PWM
{
if(sd_sum >= Date) sd_sum = Date;
if(sd_sum <= -Date) sd_sum = -Date;
}
/*直立环PD*/
int16_t Vertical_PID_value(float measure,float theoretic)
{
zl_error = measure - theoretic; //与目标的距离
zl_difference = zl_error-zl_measure_last; //与目标的距离 的变化量(微分)
zl_measure_last = zl_error; //赋值
return zl_Kp*zl_error + zl_Kd*zl_difference; //计算PD
}
/*速度环PI*/
int16_t Velocity_PID_value(int16_t measure,int16_t theoretic)
{
float a=0.3;
sd_error = measure - theoretic; //与目标的距离
sd_sum = sd_sum+sd_error*0.02; //积分
Limit(2000); //积分限幅
sd_filt = a*measure+(1-a)*sd_error_last; //大权重给到上一次速度,滤波
sd_error_last = sd_error; //赋值
return sd_Kp*sd_filt + sd_Ki*sd_sum; //计算PI
}
/*转向环PD*/
int16_t Trun_PID_value(float measure,float theoretic)
{
zx_error = measure - theoretic; //与目标的距离
zx_difference = measure - zx_measure_last; //与目标的距离 的变化量(微分)
zx_measure_last = measure; //赋值
return zx_Kp*zl_error + zx_Kd*zl_difference; //计算PD
}
3.motor.C电机配置
#include "stm32f10x.h" // Device header
#include "PWM.h"
/*电机正反转引脚初始化*/
uint8_t Motor_Flag;//电机启动标志位
void Motor_Init(void)
{
Motor_Flag=1;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_IintStructure;
GPIO_IintStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_IintStructure.GPIO_Pin=GPIO_Pin_13 | GPIO_Pin_12 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_IintStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_IintStructure);
PWM_Init();
}
/*设置 电机1 PWM*/
void Motor_SetSpeed1(int16_t Speed)
{
if(Motor_Flag==1)
{
if(Speed>0)
{
GPIO_SetBits(GPIOB,GPIO_Pin_13);
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
PWM_SetCompare4(Speed);
}
else
{
GPIO_SetBits(GPIOB,GPIO_Pin_12);
GPIO_ResetBits(GPIOB,GPIO_Pin_13);
PWM_SetCompare4(-Speed);
}
}
}
/*设置 电机2 PWM*/
void Motor_SetSpeed2(int16_t Speed)
{
if(Motor_Flag==1)
{
if(Speed>0)
{
GPIO_SetBits(GPIOB,GPIO_Pin_14);
GPIO_ResetBits(GPIOB,GPIO_Pin_15);
PWM_SetCompare1(Speed);
}
else
{
GPIO_SetBits(GPIOB,GPIO_Pin_15);
GPIO_ResetBits(GPIOB,GPIO_Pin_14);
PWM_SetCompare1(-Speed);
}
}
}
/*电机关闭*/
void Motor_Reset()
{
GPIO_ResetBits(GPIOB,GPIO_Pin_14); //关闭引脚
GPIO_ResetBits(GPIOB,GPIO_Pin_15);
GPIO_ResetBits(GPIOB,GPIO_Pin_13);
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
Motor_Flag=0;//标志位置0
}
/*电机开启*/
void Motor_Set()
{
Motor_Flag=1;
}
/*PWM限幅,PWM赋值*/
void Motor_SetDoubleSpeed(int16_t limit,int16_t *pwm1,int16_t *pwm2)
{
if(*pwm1 >= limit) *pwm1 = limit;
if(*pwm1 <= -limit) *pwm1 = -limit;
if(*pwm2 <= -limit) *pwm2 = -limit;
if(*pwm2 >= limit) *pwm2 = limit;
Motor_SetSpeed2(*pwm2);
Motor_SetSpeed1(*pwm1);
}4.encode.C译码器读速度
#include "stm32f10x.h" // Device header
/*译码器初始化*/
void Encoder_Init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //初始化时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure; //初始化GPIO为上拉输入
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_1 |GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);//GPIOA
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6 |GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);//GPIOB
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //配置时基单元
TIM_InternalClockConfig(TIM2);
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; //时钟分割,外部引脚触发,进入边沿检测
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period=65536-1;
TIM_TimeBaseInitStructure.TIM_Prescaler=1-1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//TIM2
TIM_InternalClockConfig(TIM4);
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; //时钟分割,外部引脚触发,进入边沿检测
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period=65536-1;
TIM_TimeBaseInitStructure.TIM_Prescaler=1-1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM4,&TIM_TimeBaseInitStructure);//TIM4
/*TIM2测速*/
TIM_ICInitTypeDef TIM_ICInitStructure; //开启两通道边沿性检测
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel=TIM_Channel_1;
TIM_ICInitStructure.TIM_ICPolarity=TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICFilter=0xf;
TIM_ICInit(TIM2,&TIM_ICInitStructure);//TIM2
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel=TIM_Channel_2;
TIM_ICInitStructure.TIM_ICPolarity=TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICFilter=0xf;
TIM_ICInit(TIM2,&TIM_ICInitStructure);//TIM2
/*TIM4测速*/
TIM_ICStructInit(&TIM_ICInitStructure); //开启两通道边沿性检测
TIM_ICInitStructure.TIM_Channel=TIM_Channel_1;
TIM_ICInitStructure.TIM_ICPolarity=TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICFilter=0xf;
TIM_ICInit(TIM4,&TIM_ICInitStructure);//TIM4
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel=TIM_Channel_2;
TIM_ICInitStructure.TIM_ICPolarity=TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICFilter=0xf;
TIM_ICInit(TIM4,&TIM_ICInitStructure);//TIM4
//两通道进入译码器接口
TIM_EncoderInterfaceConfig(TIM2,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);
TIM_Cmd(TIM2,ENABLE);//TIM2
TIM_EncoderInterfaceConfig(TIM4,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);
TIM_Cmd(TIM4,ENABLE);//TIM4
}
int16_t Speed1,Speed2;
/*获取电机速度*/
int16_t Encoder_Get_Speed1(void)
{
Speed1=TIM_GetCounter(TIM2);
TIM_SetCounter(TIM2,0);
return Speed1;
}
int16_t Encoder_Get_Speed2(void)
{
Speed2=TIM_GetCounter(TIM4);
TIM_SetCounter(TIM4,0);
return Speed2;
}以上函数可能存在一些冗余,可以进行适当修改
四、绘制原理图
在绘制原理图之前最好先用面包板把基本电路连接出来,整理完了之后再进行原理图的绘制

以下是我画的原理图(上面有教程视频)

在画原理图的时候我们要对模块使用的引脚进行一些规划,使其在硬件方面发挥最佳的性能,也要考虑其在PCB布线时是否便利
注意:这个原理图有一些错误,对之后在PCB上的测试造成了许多麻烦,陀螺仪上的PB10和PB11应该对调,这两个引脚对应的是单片机上的SCL、SDA,通过这次教训,我明白了画原理图一定一定要检查其与实物的关系
五、设计PCB电路并打板焊机组装
在确保原理图的正确之后,我们就可以开始PCB的绘制(上面有教程)


打板(立创EDA白嫖)

关于焊接的话最好得去学一下,因为这个是我的初次焊接,用了我很长的时间


PCB设计错误:
1.因为我上面原理图设计的错误,导致我PCB设计的时候接线也接错了
2.我应用的MP1584封装与我买的实物大小不同,导致我在组装时发生了引脚浮空
3.除了接线错误之外,我还这个PCB布局还发生了错误,因为我为电机买的6PIN接口不是直针,而是有90°弯折的,所以我只有反向焊接才能保证电机接口的正确
4.并且,我的6PIN接口还阻碍了铜柱的组装(旁边有一个孔是用来给PCB固定的,但是被接口挡住了)


六、算法编写及调试
算法的代码在上面已经有相关的展示。在我看来,开发STM32平衡车最难的就是PID的参数调节,具体可以看上面的视频,这里不过多的赘述。调好参数后,平衡车就能实现基本的平衡功能
七、烧坏驱动模块

泪目
有挺多小伙伴找我要代码
在这里放个链接
通过百度网盘分享的文件:1-4 stm32平衡车测试.rar
链接:https://pan.baidu.com/s/1OeK66z0IIi_bY3r6h1Ki3w
提取码:citm

















 5142
5142

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









