







 本文深入探讨了控制系统中的频率特性,包括极坐标图和对数坐标图的解析。通过频率响应和开环传递函数,阐述了系统稳定性的判断方法。此外,详细讲解了伯德图的绘制及最小相位系统与非最小相位系统的区别,并讨论了系统类型与稳态误差之间的关系。
本文深入探讨了控制系统中的频率特性,包括极坐标图和对数坐标图的解析。通过频率响应和开环传递函数,阐述了系统稳定性的判断方法。此外,详细讲解了伯德图的绘制及最小相位系统与非最小相位系统的区别,并讨论了系统类型与稳态误差之间的关系。
系列文章目录
文章目录
前言
频率响应法的特点
- 不用解特征根,用简单图解法研究系统稳定性;
- 系统频率特性可用实验法确定;
- 用频率法可设计出抑制噪声的系统;
- 频率法不仅适用于线性系统,也适用于某些非线性系统。
- 三阶及以上系统的频率特性和时间响应之间只有间接联系,不能直接反映系统的瞬态响应。
一、频率特性概述
- 频率响应: 在正弦输入作用下,系统输出的稳态值称为频率响应。
- 频率特性: 频率响应c(t)与输入正弦函数r(t)的复数比。
二、极坐标图
1.将开环传递函数按典型环节分解

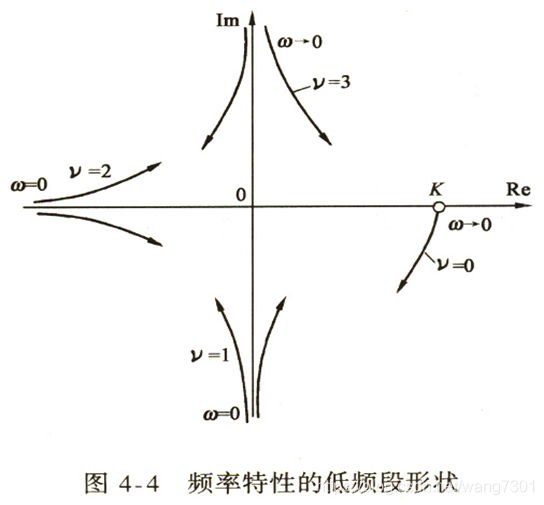
2.起点和终点
1.起点( ω → 0 + ω\to{0^+} ω→0+)
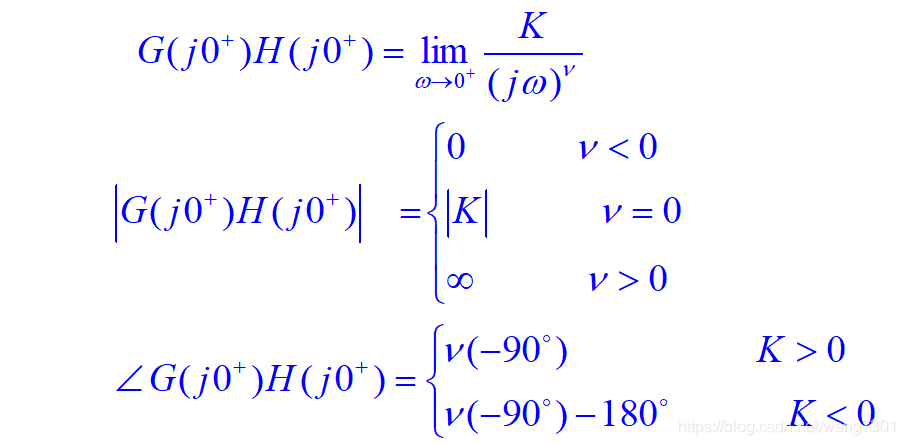
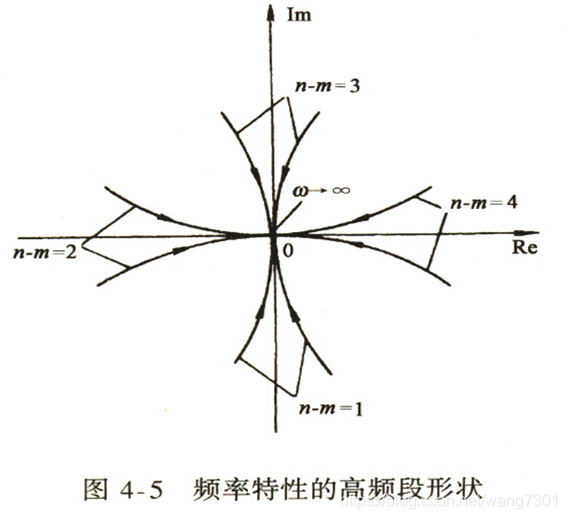
2.终点( ω → ∞ ω\to\infty ω→∞)

3.与坐标轴交点
与实轴交点,令虚部等于0,求出ω,代入得实轴交点
与虚轴交点类似
三、对数坐标图
ω c ω_c ωc:幅值穿越频率,此时 L ( ω ) = 0
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 7900
7900

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











