







无人机中的各类坐标系学习笔记:
北东地坐标系(NED, north-east-down)
东北天(ENU, east-north-up)
机体坐标系(body frame)
…
1 导航中的坐标系理解
导航中,最重要的两个坐标系是载体坐标系(body frame)和导航坐标系。
载体坐标系 是以载体为中心,主要作用是处理与传感器直接测得的物理量。
导航坐标系 可以是地固坐标系、地理坐标系等等,通常使用的是当地水平坐标系,俗称有“东北天”、“北东地”坐标系。
2 无人机中NED坐标理解
2.1 机体坐标系
机体坐标系固连飞机,其原点 取在多旋翼的重心位置上。 x轴在多旋翼对称平面内指向机头(机头方向与多旋+字形或X字形相关)。 z轴在飞机对称平面内,垂直轴向下。然后,按右手定则确定y轴 。
2.2 地球固联坐标系
通常以多旋翼起飞位置作为坐标原点 。先让x轴在水平面内指向某一方向,z轴垂直于地面向下。然后,按右手定则确定y轴,坐标原点还有用地心的?比如NED坐标系为x轴为正北方向,y轴为正东方向,z轴指向下。
飞机的欧拉角就是基于上面两个坐标系的转换。pitch+为抬头,roll+为右旋转,yaw+为右偏航。
2.3 Yaw与指南针角度的关系
指南针的角度是确定不变的,北朝向为0度,东为90度,南为180度,西为270度。Yaw角是当前机头方向与正北方向的夹角(若地球固联坐标系为NED),也就是说当我们知道YAW角时我们就可以确定飞机当前的航向(东,北哪个方向),比如我们的vision通过mavros给飞控的Yaw的角度是90度,而且飞机的地球固联坐标系为NED,那么可以确定飞机机头当前指向为正东,即使我们没有磁力计测方向,但我们假设了一个方向,此时Yaw角与指南针的角度完全重合或者说相同。
但当我们的Yaw角为90度,机头朝向为正北方向,那么我们可以确定飞机地球固联坐标系采用的是WND(W为西)。
在PX4中用到的地球固联坐标轴是NED坐标系,即x,y,z的方向固定不变(Offboard模式下除外,但是在offboard模式下,初始上电后其东北方向由Yaw角决定)
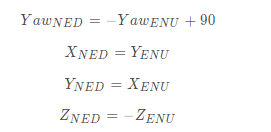
2.4 东北天坐标系与北东地坐标系的转换

在ROS中用到的坐标系是ENU坐标系,而飞控中用到的坐标系是NED。
则有:
参考资料1:阿木实验室论坛















 7241
7241











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









