







 本篇博客介绍了如何在ROS Gazebo仿真环境中,成功导入并使用Kinetic和Hokuyo激光雷达。由于上一篇博客中rviz导致gazebo进程中断,本文提供了解决方案,通过修改特定软件包和配置文件,实现两者共存。详细步骤包括代码修改、软件包备份以及添加环境变量。最终展示了gazebo和rviz的运行效果,并提供了相关代码压缩包下载链接。
本篇博客介绍了如何在ROS Gazebo仿真环境中,成功导入并使用Kinetic和Hokuyo激光雷达。由于上一篇博客中rviz导致gazebo进程中断,本文提供了解决方案,通过修改特定软件包和配置文件,实现两者共存。详细步骤包括代码修改、软件包备份以及添加环境变量。最终展示了gazebo和rviz的运行效果,并提供了相关代码压缩包下载链接。
roslaunch turtlebot_gazebo turtlebot_world.launch
roslaunch turtlebot_teleop keyboard_teleop.launch
roslaunch turtlebot_gazebo gmapping_demo.launch
roslaunch turtlebot_rviz_launchers view_navigation.launch补充:首先先试试看能否运行以上命令,不能的话就安装相应的包吧。
参考文章:
http://blog.csdn.net/qq_36355662/article/details/61413860
http://blog.csdn.net/qq_36355662/article/details/61616513
http://blog.csdn.net/changer_sun/article/details/79264388
上一篇博客建图时打开rviz会造成gazeon进程中断,因此干脆另外使用激光传感器hokuyo与kinect共存
为方便日后使用,将所有/opt/ros/kinetic/share下有修改的代码都另建一份,放在工作空间的pkg下。
文末尾上传了代码,实现gazeon下的建图仿真
有修改的软件包如下:
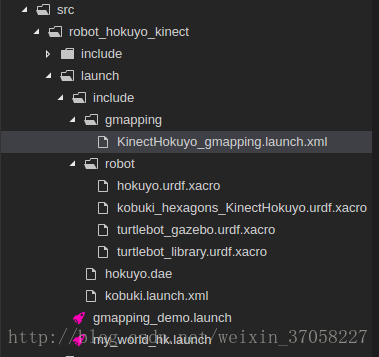
即上图显示的程序都需要修改;下面贴出代码:
file: my_world_hk.launch
<launch>
<arg name="world_file" default="$(env TURTLEBOT_GAZEBO_WORLD_FILE)"/>
<arg name="base" value="$(optenv TURTLEBOT_BASE kobuki)"/> <!-- create, roomba -->
<arg name="battery" value="$(optenv TURTLEBOT_BATTERY /proc/acpi/battery/BAT0)"/> <!-- /proc/acpi/battery/BAT0 -->
<arg name="gui" default="true"/>
<arg name="stacks" value="$(optenv TURTLEBOT_STACKS hexagons)"/> <!-- circles, hexagons -->
<!--arg name="3d_sensor" value="$(optenv TURTLEBOT_3D_SENSOR kinect)"/--> <!-- kinect, asus_xtion_pro -->
<arg name="3d_sensor" value="$(optenv TURTLEBOT_3D_SENSOR KinectHokuyo)"/> <!-- kinect, asus_xtion_pro -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="use_sim_time" value="true"/>
<arg name="debug" value="false"/>
<arg name="gui" value="$(arg gui)" />
<arg name="world_name" value="$(arg world_file)"/>
</include>
<!--include file="$(find turtlebot_gazebo)/launch/includes/$(arg base).launch.xml"-->
<include file="/home/jk/ros_sim/src/robot_hokuyo_kinect/launch/include/$(arg base).launch.xml">
<arg name="base" value="$(arg base)"/>
<arg name="stacks" value="$(arg stacks)"/>
<arg name="3d_sensor" value="$(arg 3d_sensor)"/>
</include>
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher">
<param name="publish_frequency" type="double" value="30.0" />
</node>
<!-- Fake laser -->
<node pkg="nodelet" type="nodelet" name="laserscan_nodelet_manager" args="manager"/>
<node pkg="nodelet" type="nodelet" name="depthimage_to_laserscan"
args="load depthimage_to_laserscan/DepthImageToLaserScanNodelet laserscan_nodelet_manager">
<param name="scan_height" value="10"/>
<param name="output_frame_id" value="/camera_depth_frame"/>
<param name="range_min" value="0.45"/>
<remap from="image" to="/camera/depth/image_raw"/>
<remap from="scan" to="/scan"/>
</node>
</launch>file:kobuki.launch.xml
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3260
3260

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









