









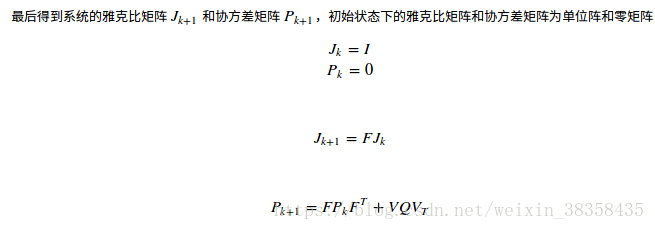
前段时间推了泡泡机器人邱笑晨博士的IMU预积分公式,收获很大,再看到VIORB的时候,大都用的这一套公式.
后再看VINS的时候,VINS用的是连续时间的预积分,看一些大佬的博客,说代码里写的是离散时间的.这里将所看到的做一下整理.
要求的是:
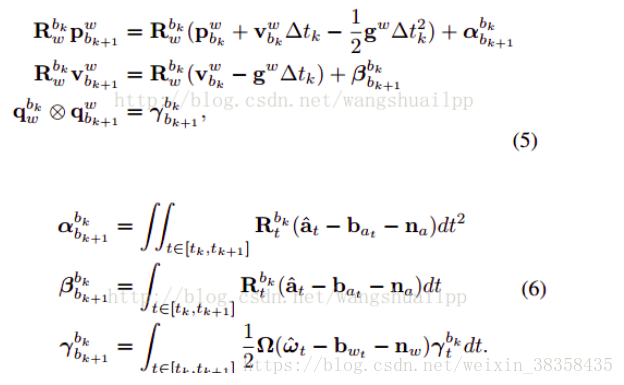
即要求
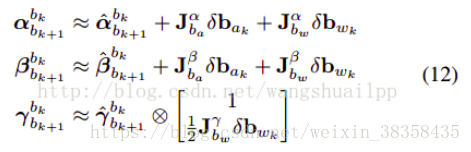
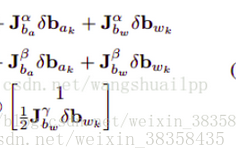
这里要求的三个临时状态量只与IMU的偏置有关系,而与其他状态无关 可以写成一阶线性展开近似
其中的
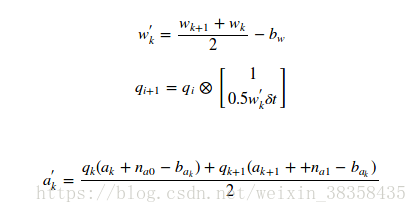
论文中用的欧拉积分,代码中用的中值积分,中值积分求法如下:
首先陀螺仪的测量模型和加速度计的测量模型:
离散时间的预积分过程(中值法)
 (1) (2) (3)
(1) (2) (3)
由泰勒展开式可得
(4)
由Quaternion kinematics for the error-state KF第54页(237c)公式:
将(1)代入到(5)得(注意这里实际上就是
而
在后面的处理,其实就是
):
![]() (6)
(6)
将(6)代入到(4)得:
 (7)
(7)
得到了再来看
.
(8) (注意这里,
不是a的导数,就是公式3)
由Quaternion kinematics for the error-state KF第54页(237b)公式:
![]() (9)
(9)
将(3)代入到(9)可以得:
(10) 没有
项
将(7)代入到(10)可得:
 (11)
(11)
同理可得到位移的关系:
 (12)
(12)
然后可以得到陀螺仪和加速度计偏置的误差:
![]() (13)
(13)
![]() (14)
(14)
综上可以写成矩阵形式:
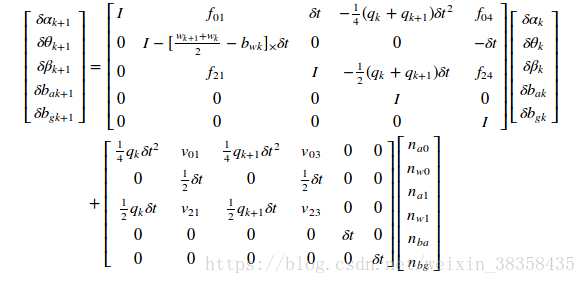
其中:
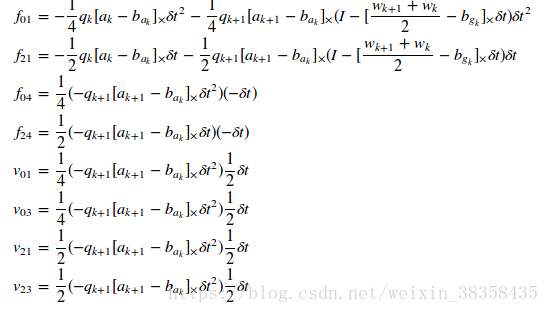
矩阵可简写为:
![]()
求完
还需要求针对偏置的偏导项,在优化时用到做残差优化.
偏导项部分可以从上面的矩阵形式直接看出.
以上有看完代码后的修改...有很多很糙的截图.
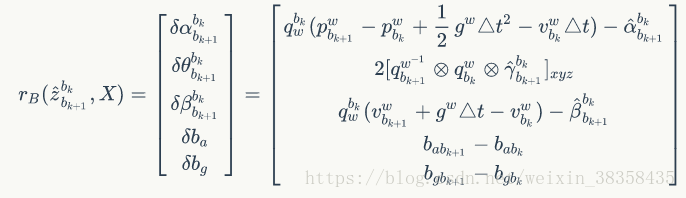
残差就是将预积分相当于测量值(就是真值,因为没有比这个更准确的值了,那当然就是真值了),要估计的状态就是估计值,所以预积分测量值减去状态估计值就是残差,在后面会提到需要估计的IMU估计值有p,v,q,ba,bg。P和q的估计值初始值比较好得到(和视觉相关,可以直接用视觉的初值),而v,ba,bg这三个量的估计值初始值就比较难得到了,因为视觉没有这三个初始量,就会用到下面的联合初始化得到初始的这三个量.
残差向量 ,状态向量
![]() 和偏置
和偏置.
残差可以表示为:
首先看
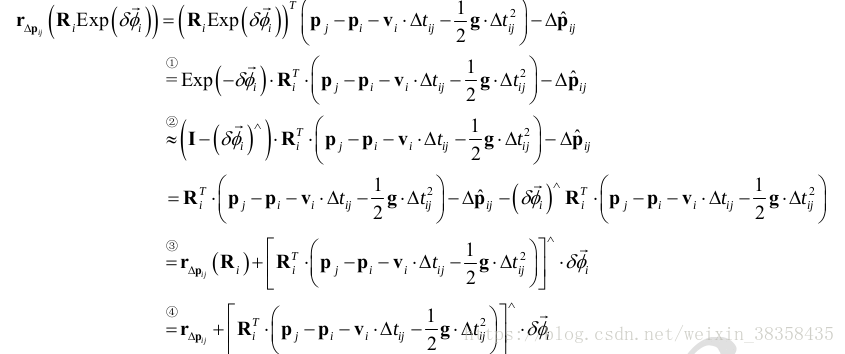
1. 对Ri求偏导.
2. 对Rj求偏导.
3. 对偏置求偏导.
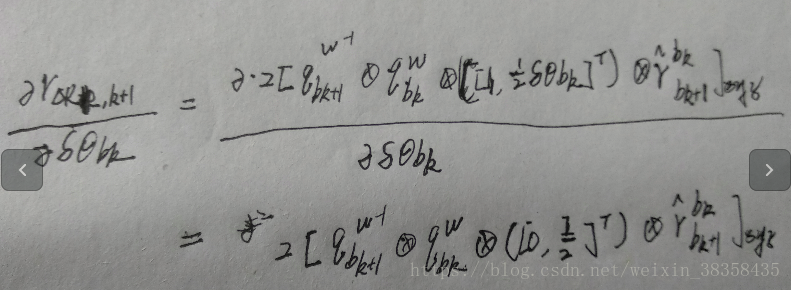
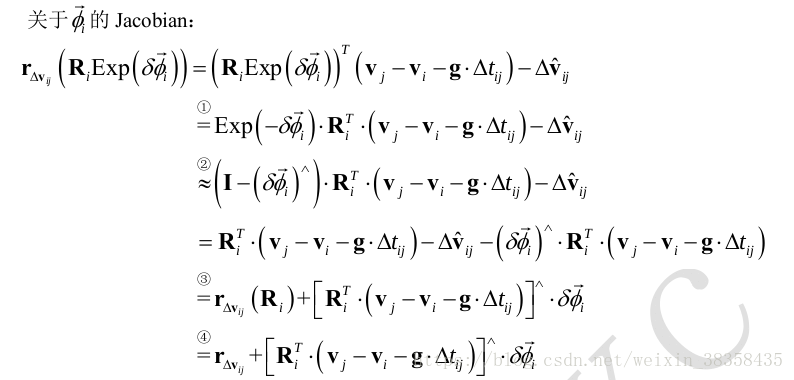
然后是对求雅克比
1. 对求偏导.
2. 对求偏导.
3. 对求偏导.
4. 对求偏导.
5. 对Ri求偏导.
![]()
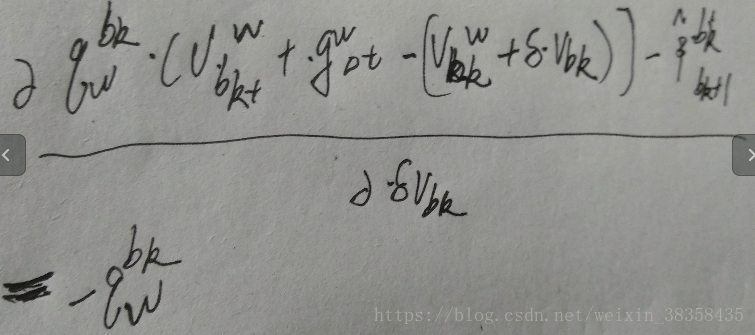
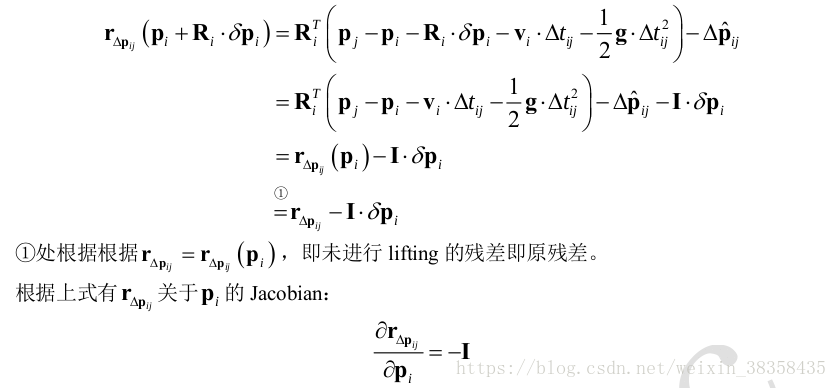
最后求雅克比
1. 对 求偏导
2. 对求偏导
3. 对求偏导
4. 对求偏导

5. 对求偏导
![]()
6. 对Ri求偏导
![]()
全部的残差雅克比求完了.
邱笑晨博士的IMU预积分推导

















 1002
1002

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









