









 本文详细介绍了Qualcomm机器人RB5开发套件的热管理策略、RB5夹层板的功能,包括视觉和5G接口,以及如何更新和管理软件,如使用ADB、fastboot、QPM和PCAT等工具。指南还列出了主机系统的要求和软件安装步骤。
本文详细介绍了Qualcomm机器人RB5开发套件的热管理策略、RB5夹层板的功能,包括视觉和5G接口,以及如何更新和管理软件,如使用ADB、fastboot、QPM和PCAT等工具。指南还列出了主机系统的要求和软件安装步骤。
Qualcomm 机器人 RB5 开发套件用户指南(2)
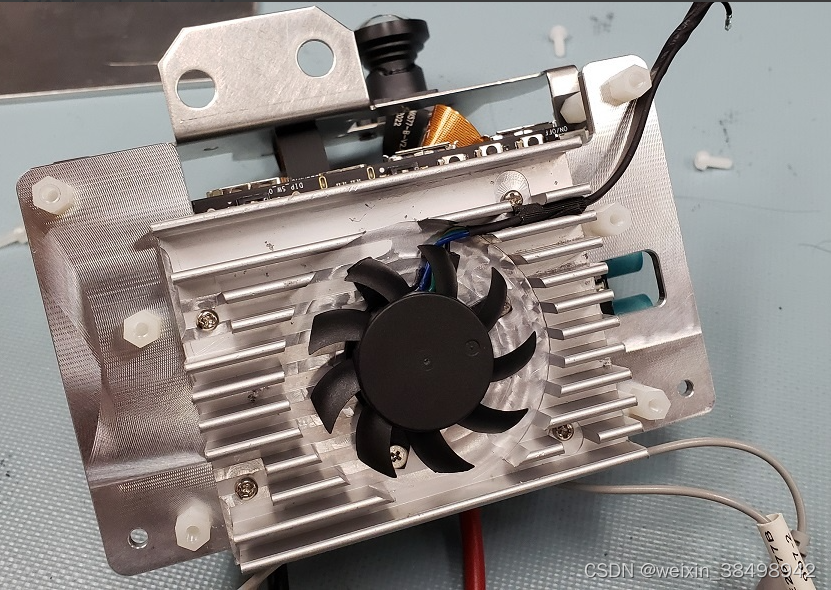
2.4 热管理
标准 RB5 套件(核心或愿景)配有薄铝基板,可实现机械稳定性和热管理。对于高功率用例(向处理器提供超过 6 W 的功率),如果需要,可以从此处购买额外的螺栓固定式风扇。
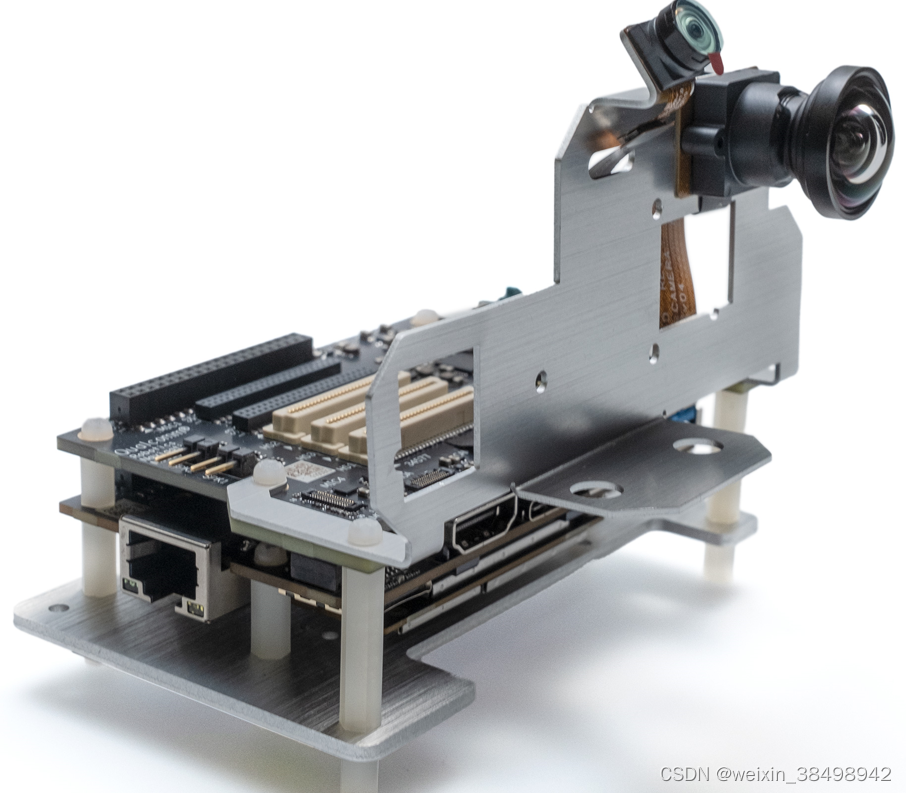
2.5 RB5夹层板
RB5开发套件支持视觉和5G夹层板。
视觉夹层
视觉夹层旨在支持相机与 RB5 平台的连接。该夹层还添加了千兆位多媒体串行链路 (GMSL) 以及 4 个 DMIC。
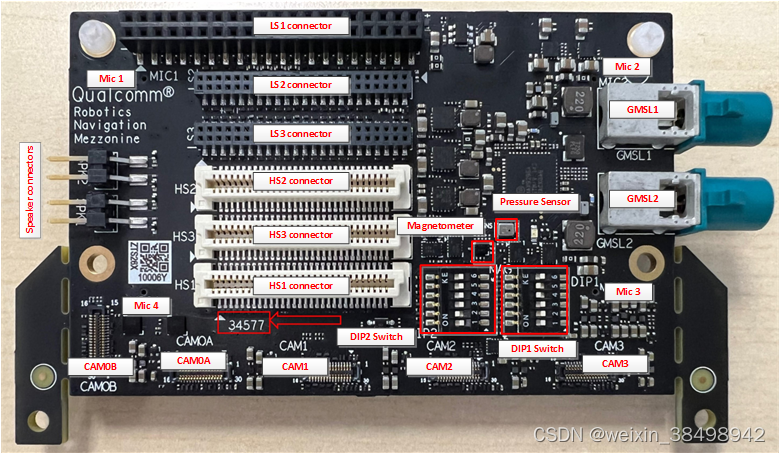
视觉夹层支持以下关键组件:
相机
-
2x GMSL2 摄像头输入(使用 MAX9296A)、CSI4 和 CSI5
-
五个具有相同引脚排列的 CAM/CSI 摄像头端口:CSI0 分为两个摄像头(CAM0A 和 CAM0B)
-
CAM3 连接器包括 5 V 更高电源电压选项,可容纳 Panasonic TOF 相机
-
CAM0B 有一个并行/重复连接器
-
主摄像头(IMX577);部件号:CMK-IMX577-B-V2.0,用于插入连接器 CAM2、CSI2
-
跟踪摄像机(OV9282);部件号:CMK-VR-OV9282-V1.0,用于插入连接器 CAM1、CSI1
传感器 -
TDK ICM-42688-P IMU(位于板的背面)
-
AKM 指南针/磁力计 AK09919
-
TDK压力传感器(ICP-10111)
声音的 -
四个直接与 RB5 平台连接的数字 PDM 麦克风
-
扬声器连接器

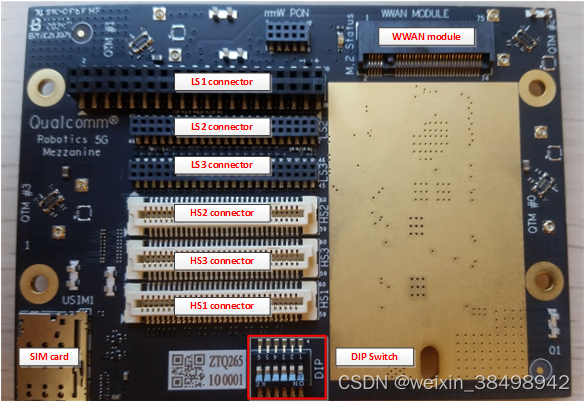
5G夹层
5G 夹层支持 5G M.2 模块与 RB5 平台的连接。也可以使用其他 WAN M.2 组件;例如,4G LTE 模块。

3 更新软件
RB5 开发套件的系统软件是应用处理器的多个子系统二进制文件和芯片组上可用的各种子系统的组合。有多种方法可以将最新的软件版本刷新到 RB5 开发板上。
-
Thundercomm 的流程
如果您打算刷新制造商提供的原始系统软件,则必须按照《Thundercomm SDK Manager 用户指南》中描述的步骤进行操作。对于此过程,您需要以下工具:- 高通机器人 RB5 SDK 管理器
该工具可从 Thundercomm 获取,并且可在Thundercomm网站上获取下载、安装和使用该工具的说明。要使用此工具,您必须拥有 Thundercomm 的有效帐户。
-
高通的程序
如果您打算刷新 Qualcomm 提供的选定系统软件版本,则必须遵循本文档中描述的过程。对于这些过程,您需要以下工具:- 高通封装管理器 (QPM)
- 高通产品配置协助 (PCAT) 工具
- 高通 USB 驱动程序 (QUD)
- 高通统一工具服务 (QUTS)
这些工具可从 Qualcomm 获取,本文档中包含下载和安装这些工具的说明。要使用这些工具,您需要拥有 Qualcomm 的有效帐户。
笔记
要下载、构建和编译该软件,请参阅 Qualcomm 的选定软件发行说明。
3.1 主机系统先决条件
主机系统应满足以下最低要求:
- X86机器。
- 至少 200 GB 可用磁盘空间。
- Linux 发行版:Ubuntu 20.04 LTS。(请勿使用其他版本:14.04/16.04/18.04/19.04)。
- 至少 16 GB RAM。
- 四核 CPU,例如,3.4 GHz 的 Intel i7-2600(同等或更高)。
笔记
不建议使用虚拟机环境来构建软件。
3.1.1 更新基于 Ubuntu 的软件包
要更新基于 Ubuntu 的软件包,请运行以下命令:
adb shell
apt update
3.1.2 安装Android调试桥和fastboot
Android 调试桥 (ADB) 是一个命令行工具,可实现与 RB5 设备的通信。该adb命令有助于各种设备操作,例如捕获内核日志、将应用程序和文件推送到目标设备以及允许您登录设备来编译应用程序。
Fastboot 是一个程序,用于通过主机的 USB 连接列出、安装和擦除操作系统二进制映像到非易失性存储器(例如遵守 fastboot 协议的设备上的闪存文件系统分区)。此方法要求设备在启用 fastboot 协议的情况下以 bootloader 模式启动。
-
要安装 adb 和 fastboot,请在开发主机上运行以下命令:
sudo apt install git android-tools-adb android-tools-fastboot wget
笔记
- 要刷新设备,请从https://androidsdkmanager.azurewebsites.net/Platformtools安装基于版本 r29.0.5 的平台工具。
- 通过运行以下命令验证主机系统上的 adb 版本:
adb --version 示例输出:Android 调试桥版本 1.0.41
版本29.0.5-5949299
3.1.3 安装高通包管理器 (QPM)
QPM 是一款轻量级、始终在线的客户端软件,需要安装 Qualcomm 的工具。
有关安装说明,请访问QPM页面。
为了进行身份验证,客户端计算机必须连接到https://corpawswsgwx.qualcomm.com。
笔记
如果缺少 的依赖项libgtkmm-3.0-1v5,请运行以下命令来安装包文件:sudo dpkg -i --ignore-depends=<package(s) to ignore> <QPM Linux .deb package file>
3.1.4 安装产品配置助手工具 (PCAT)
PCAT 是一个用于配置和管理芯片组设备的集成软件包。PCAT 工具对于更新目标上的系统软件以及从 QDL 模式恢复器件非常有用。
有关如何使用 PCAT 工具的更多信息,请参阅Qualcomm 产品配置助手工具 (PCAT) 用户指南(80-PR518-1)。要安装 PCAT 工具,请执行以下操作:
-
下载并安装 Mono 6.12.0。有关安装说明,请参阅https://www.mono-project.com/download/stable/#download-lin。
Mono 是一个软件平台,旨在使开发人员能够轻松创建跨平台应用程序。Mono 是 Microsoft .NET Framework 的开源实现,作为 .NET Foundation 的一部分,基于 C# 和公共语言运行时的 ECMA 标准。PCAT工具使用最新的Mono版本。按照基于 Ubuntu 的主机的安装说明进行操作。
要验证版本,请运行以下命令:
mono --version -
按指定顺序安装以下工具。默认情况下,工具安装在该 /dev目录中。如果您选择将工具安装在不同的目录中,请确保正确使用更新的文件路径。
a. 高通 USB 驱动程序 (QUD)
b. 高通统一工具服务(QUTS)
c. PCAT -
要验证您是否有权访问 QUD、QUTS 和 PCAT 工具,请运行以下命令:
qpm-cli --product-list该命令显示您有权访问的所有产品和工具。
示例输出:
---- 产品列表 ---- 羊驼 apex apex7 deepmap … … pcat qcat … … qud quts qxdm5
-
要激活 QUD、QUTS 和 PCAT 许可证,请运行以下命令:
qpm-cli --license-activate qudqpm-cli --license-activate qutsqpm-cli --license-activate pcat -
安装 QUD、QUTS 和 PCAT。确保按照指定的顺序安装工具。
qpm-cli --install qudqpm-cli --install qutsqpm-cli --install pcat -
要验证 PCAT 版本号,请运行以下命令:
pcat -version -
要显示 PCAT 命令行用法,请运行以下命令:
pcat -help
3.2 闪存RB5软件
先决条件:
- 确保主机系统上安装了 PCAT。
- 确保按照 Qualcomm 发行说明中的步骤在主机系统上创建完整的版本。
您可以采用以下方法之一将最新的软件版本刷新到RB5开发板:
- 要使用 Qualcomm PCAT 工具进行闪存(当器件处于 QDL 模式时),请参阅使用 PCAT 的闪存系统。
- 要使用 Qualcomm fastboot 脚本(HLOS 和非 HLOS)进行闪存,请参阅使用 fastboot 的闪存系统。
- 要仅刷新 HLOS 映像,请参阅使用 fastboot 刷新 Linux。
要了解设备是否使用 Linux Ubuntu 还是 Linux Embedded 软件进行闪存更新,请执行以下操作:
-
将开发板连接到adb,然后给设备上电。
-
一旦设备被检测为adb设备,请运行以下命令:
adb rootadb shell cat /firmware/verinfo/ver_info.txt | grep "Meta_Build_ID"笔记
如果使用 Ubuntu 刷新构建版本,则构建 ID 显示UBUN,否则将了解该设备包含 Linux 嵌入式软件。
3.2.1 带 PCAT 的闪存系统
先决条件:
- 确保已安装 QUD、QUTS 和 PCAT 工具。
- 确保 QRB5165 系统软件可用于所有必需的可执行二进制文件。
笔记
有关详细信息,请参阅 Qualcomm 的选定软件发行说明。
以下过程提供有关如何使用 PCAT 工具将系统软件下载到设备的信息。
要进入 Qualcomm 下载 (QDL) 模式,请执行以下操作:
- 在未插入 USB 和电源的情况下,按住F_DL键。
- 通过 USB Type-C 将设备连接到主机系统。
- 将设备连接到 +12V 墙上电源。
- 当设备在下载或 9008 模式下可见后,松开F_DL键。下载或 9008 模式在 PCAT 工具界面上可见。

-
要检查QTI_HS-USB_QDLoader驱动程序在安装目录中是否可用,请在主机上运行以下命令:
ls –la /dev/Q*示例输出:
crw-rw-rw- 1 根根 242 0 12 月 10 日 10:51 /dev/QTI_HS-USB_QDLoader_9008_3-8:1.0
-
要验证设备是否已进入QDL模式,请在主机上运行以下命令:
lsusb示例输出:
总线 002 设备 014:ID 05c6:9008 Qualcomm, Inc. Gobi 无线调制解调器(QDL 模式)
-
要检查 PCAT 是否识别设备,请在主机上运行以下命令:
pcat -devices示例输出:
正在设备管理器中搜索设备,请稍候… ID | 设备类型 | 设备状态 | 序列号 | 亚行序列号 | 描述 | | EDL | d16770b2 | 高通 USB 复合设备:QUSB_BULK_CID:0404_SN:D16770B2
-
下载系统软件。
a. 要下载元构建,请在主机上运行以下命令:
PCAT –PLUGIN SD -DEVICE <device_serial_number> -BUILD “<path_to_content_xml>/contents.xml” -MEMORYTYPE UFS -FLAVOR asicb. 要下载平面版本,请在主机上运行以下命令:
PCAT –PLUGIN SD -DEVICE <device_serial_number> -BUILD “<path_to_flat_build>” -MEMORYTYPE UFS -FLAVOR asic
3.2.2 带快速启动的闪存系统
以下过程提供有关如何使用 fastboot 脚本将完整系统软件下载到设备上的信息。
笔记
如果设备未进入快速启动模式,请按照使用 PCAT 工具中的步骤进行操作。
fastboot 脚本与软件发布包一起从 Qualcomm ChipCode™门户下载。
-
要检查设备是否通过 USB 连接到主机,请在主机上运行以下命令:
adb devices示例输出:
附加的设备列表 84ba9b5f 设备
要在快速启动模式下刷新设备,请使用以下选项之一:- 选项1:如果在adb模式下检测到设备,则运行命令adb reboot bootloader将设备置于fastboot模式。
- 选项 2:如果 adb 未检测到设备或设备无法启动,请使用以下步骤将设备置于快速启动模式:
- 在未插入 USB 和电源的情况下,按住VOL-键。
- 通过 USB Type-C 端口将设备连接到主机系统。
- 插入 +12V 墙壁电源。
- 松开VOL-键。
-
要验证设备是否已进入 fastboot 模式,请运行以下命令:
fastboot devices示例输出: 84ba9b5f 快速启动
-
当设备处于快速启动模式时,运行以下脚本来刷新完整的系统软件:
<base_build_root>/QRB5165.UBUN.2.0/common/build/fastboot_complete.py笔记
是<base_build_root>构建所在的本地工作空间路径。
要运行该fastboot_complete.py脚本,您必须使用 Python 版本 2.7。
3.2.3 具有快速启动功能的 Flash Linux
如果您打算仅修改应用程序处理器软件,请执行以下操作以仅将高级操作系统 (HLOS) 二进制文件闪存到设备上:
Linux Ubuntu
-
导航到应用程序处理器构建软件位置,例如, <base_build_root>/lu.um.3.3.1/apps_proc/build-qti-distro-ubuntu-fullstack-debug/tmp-glibc/deploy/images/qrb5165-rb5
-
要以 fastboot 模式刷写,请在主机上运行以下命令:
adb reboot bootloaderfastboot flash boot_a <qti-ubuntu-robotics-image-qrb5165-rb5-boot.img>fastboot flash boot_b <qti-ubuntu-robotics-image-qrb5165-rb5-boot.img>fastboot flash abl_a abl.elffastboot flash abl_b abl.elffastboot flash system <qti-ubuntu-robotics-image-qrb5165-rb5-sysfs.ext4>fastboot reboot
Linux Embedded
- 导航到应用程序处理器构建软件位置,例如,
<base_build_root>/apps_proc/build-qti-distro-fullstack-debug/tmpglibc/deploy/images/qrb5165-rb5/qti-robotics-image
-
要以 fastboot 模式刷写,请在主机上运行以下命令:
adb reboot bootloaderfastboot flash abl_a abl.elffastboot flash boot_a boot.imgfastboot flash boot_b boot.imgfastboot flash system_a system.imgfastboot flash system_b system.imgfastboot flash persist persist.imgfastboot flash userdata userdata.imgfastboot reboot

















 1074
1074

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









