









Qualcomm 机器人 RB5 开发套件用户指南(3)
4 设置设备
要在主机 PC 和 RB5 平台之间建立通信,请连接 USB 电缆以启用 Android 调试桥 (ADB) 实用程序,并连接通用异步接收器-发送器 (UART) 电缆以访问诊断消息。
连接到亚行 使用 USB Type-C 电缆将 RB5 套件与主机系统连接。确保该设备被列为 ADB 设备。
adb devices
示例输出: 附加的设备列表 68f592a 设备
输入 root 用户:
adb shell
su
示例输出: 根@qrb5165-rb5/#
设置串口
要在串行控制台上查看启动消息日志,请使用调试 microUSB 端口。
- 选择正确的COM端口并将波特率设置为115200。
- 使用帐号和密码登录。
- 账户:root
- 密码:oelinux123
4.1 设置 Wi-Fi
要设置 Wi-Fi 连接,请配置 Wi-Fi 站和 Wi-Fi 接入点 (AP) 模式。
Wi-Fi 站模式
在工作站(STA)模式下,RB5设备充当客户端,可以连接到无线热点或路由器。
配置 Wi-Fi 站点模式:
-
要启用 wlan0,请运行以下命令:
ifconfig wlan0
-
更改 SSID 和密码以与路由器 Wi-Fi SSID/密码匹配。
笔记
默认情况下,SSID 为Qualcomm,PSK 为 ********* 。adb pull /data/misc/wifi/wpa_supplicant.conf例如,
network={ ssid="Qualcomm" key_mgmt=WPA-PSK pairwise=TKIP CCMP group=TKIP CCMP psk="*********" } -
将wpa_supplicant.conf(更新的文件)推送到设备,路径为: /data/misc/wifi/#adb push wpa_supplicant.conf /data/misc/wifi/
-
重新启动设备并等待设备启动。
adb reboot -
设备启动后等待1分钟。要检查设备是否自动连接到路由器,请运行以下命令:
ifconfig wlan0
-
使用以下命令对路由器执行 Ping 操作以确认连接:
ping www.google.com
Wi-Fi 接入点 (AP) 模式
在接入点模式下,RB5设备充当接入点,其他客户端设备可以连接到它。
配置Wi-Fi AP模式:
-
wpa_supplicant重启后杀掉。要检索 的 PID wpa_supplicant,请运行以下命令:
pgrep wpa_supplicantkill -9 <wpa_supplicant_PID>笔记
<wpa_supplicant_PID>:提供wpa_supplicant PID号 -
要设置软件访问点 (SAP),请运行以下命令:
hostapd /data/misc/wifi/hostapd.conf &下图显示了使用默认文件的示例 hostapd.conf:
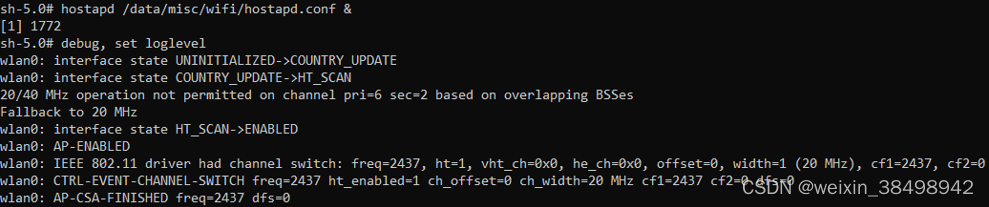
要在动态主机配置协议 (DHCP) 服务器上设置软件接入点,请运行以下命令:ifconfig wlan0 192.168.2.1 netmask 255.255.255.0 updnsmasq --dhcp-range=192.168.2.10,192.168.2.100,12h --port=5353 -
要测试连接,请导航至手机上的 Wi-Fi 设置并识别 RB5 SSID(例如 QSoftAP)。
-
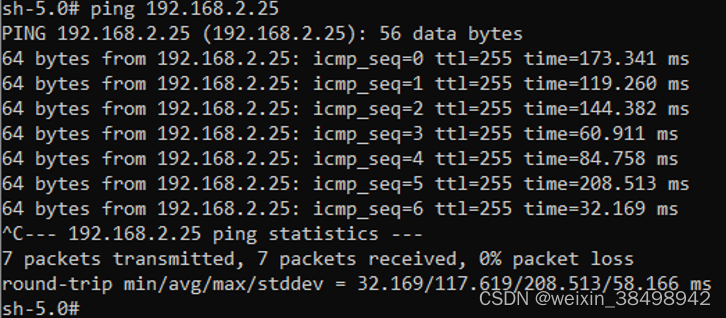
选择 RB5 SSID 并提供 RB5 hostapd 密码以连接设备。为电话选择 dhcp 范围中的 IP 地址,这意味着连接已建立。下图显示站点(STA)连接到软件接入点:

-
要验证连接,请从 RB5 设备 ping 电话的 IP 地址。
4.2 设置蓝牙技术
要设置蓝牙技术,请执行以下操作:
- 确保在 Android 调试桥上检测到该设备。
- 运行adb shell,然后btproperty &启动btconfig应用程序。
- 启动btapp并按Enter键。列出了支持配置文件。
- 启动间隙菜单。
- 运行enable命令以激活蓝牙技术。
配对设备
要配对蓝牙技术设备,请执行以下操作:
-
启用蓝牙技术并在间隙菜单中运行配对命令。
pair <BD ADDRESS of device intending to connect>例如,
pair 40:4D:7F:9D:BB:8C将显示一条通知消息。
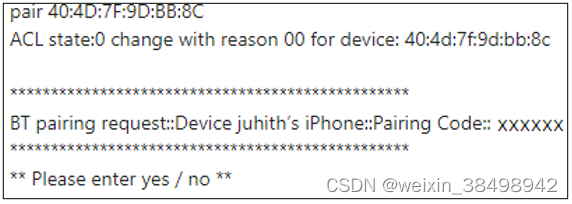
-
输入yes完成配对过程。
4.3 设置以太网
要设置以太网,请执行以下操作:
-
使用网线连接以太网端口和路由器。
a. 运行以下adbshell 命令:ifconfig eth0b. 如果该命令返回 eth0 和 IP 地址,则此结果确认以太网已连接。

-
Ping 路由器 <IP 地址> 以验证 RB5 设备是否已成功连接。

-
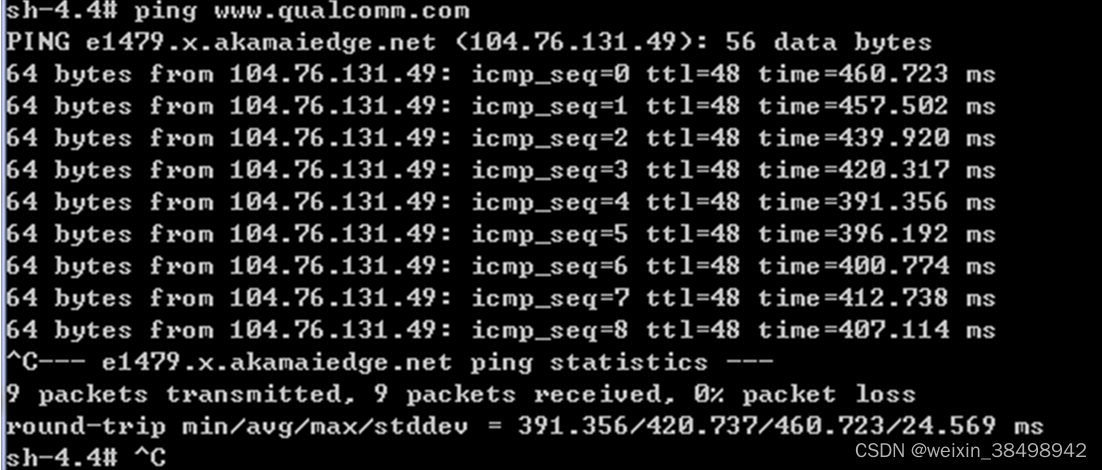
Ping 网站(例如www.qualcomm.com)以验证是否建立在线连接。
4.4 设置 HDMI 显示
默认启用 Weston。要设置 HDMI 显示,请执行以下操作:
-
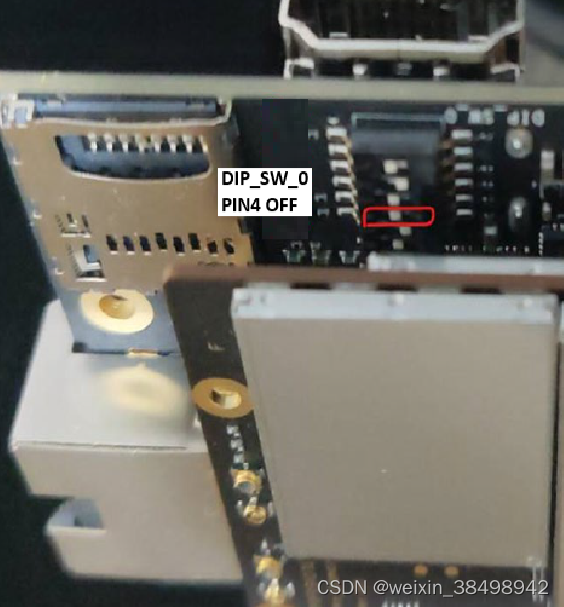
将 DIP_SW_0 的 DIP 开关 4 设置为 OFF。
-
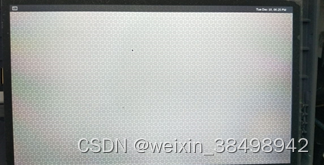
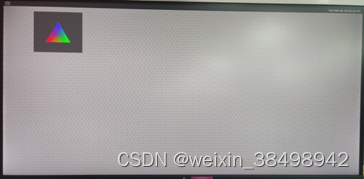
将 HDMI 电缆连接至显示屏并打开设备电源。设备启动时 Weston 会自动启动。应在显示屏上看到以下 Weston 花朵图案:
-
要运行 Weston 简单 EGL 客户端应用程序,请运行以下命令:
adb shellexport WAYLAND_DISPLAY=wayland-1export XDG_RUNTIME_DIR=/run/user/rootcd /usr/bin./weston-simple-egl笔记
该export WAYLAND_DISPLAY=wayland-1命令仅适用于Linux嵌入式系统。下图显示了在显示监视器上运行的 Weston 简单 EGL 客户端应用程序:
4.5 设置相机
USB摄像头
视频设备的 USB 设备类定义或 USB 视频类定义了 USB 上的视频流功能。USB 视频类 (UVC) 兼容外设仅需要通用驱动程序。该驱动程序实现了 Video4Linux 2 (V4L2) API。相机应用程序可以使用标准输入/输出控件来设置图像大小、格式和帧间隔,并获取图像帧。
USB 摄像头支持符合 UVC 的设备、网络摄像头、数码摄像机和静态图像相机。
4.5.1 设置 USB 网络摄像头
RB5 开发套件支持基于 USB 的相机。此支持作为 USB/UVC 小工具设备启用。
要在 RB5 开发套件上设置 USB/UVC 摄像头,请执行以下操作:
-
找到 RB5 设备上的 USB 端口并连接基于 USB 的摄像头。
-
如果USB/UVC相机连接成功,软件会创建两个v4l2设备节点。/dev/video*在连接 USB 摄像头之前和之后运行以下命令来确认是否已创建附加 :
adb rootadb shelladb shell ls -l /dev/video* -
如果相机枚举成功,请尝试通过运行Yavta等程序来启动相机。
-
要构建 Yavta,请运行以下命令:
cd pokyMACHINE=qrb5165-rb5 DISTRO=qti-distro-ubuntu-debug . qti-conf/set_bb_env.sh (choose target accordingly)bitbake yavta -
将 Yavta 推送至 RB5 开发套件。
adb push yavta /usr/bin/要将 Yavta 应用程序手动推送到 /sbin/文件夹:
adb push yavta /sbin/adb shell chmod 777 /sbin/yavta -
将USB摄像头连接到具有USB3.0 COM口的设备,然后运行以下命令来验证USB摄像头的设备ID:
adb shell ls -l /dev/video* -
要验证设备上是否存在 Yavta 应用程序,请运行以下命令:
adb shell ls -l /usr/bin/ -
要回显参数定义,请运行以下命令:
yavta –help例如:
-F, --file[=name] Read/write frames from/to disk -f, --format format Set the video format -c, --capture[=nframes] Capture frames -t, --time-per-frame num/denom Set the time per frame -
运行以下命令进行预览和转储:
yavta -f YUYV -s 1280x960 -t 1/30 -c18000 /dev/video2 -F/data/test.yuv -
要使用内部生成的文件验证相机是否成功启动 /data,请运行以下命令:
ls -l /data/*.yuv -
要检索 YUV 文件,请运行以下命令:
adb pull /data/test.yuv您可以使用7yuv播放器在主机上显示YUV文件。
4.5.2 设置 MIPI 相机
移动行业处理器接口(MIPI)相机的设置方法描述如下:
将相机连接到视觉板
将相机连接到视觉板需要以下组件:
-
Qualcomm Robotics RB5 Platform主板(主板是带USB接口的主板)
-
Qualcomm Robotics RB5 平台视觉夹层
-
跟踪摄像机和跟踪摄像机柔性
-
主摄像头和主摄像头伸缩
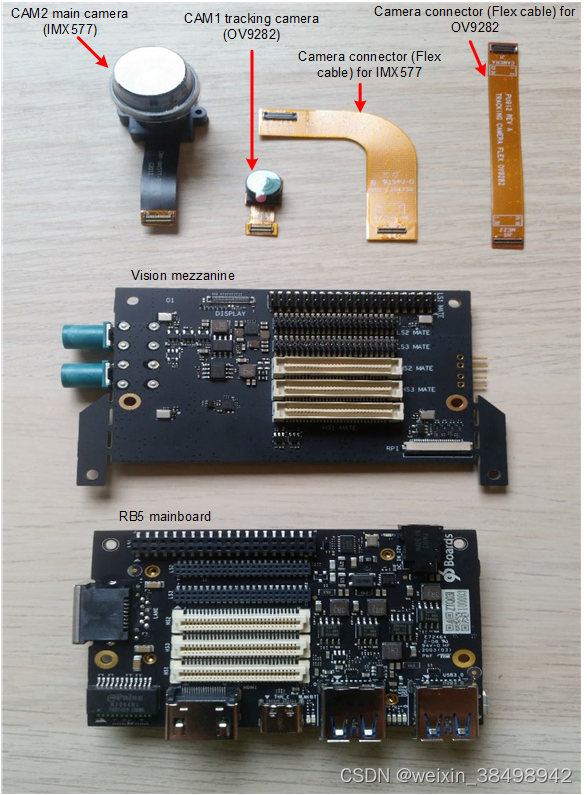
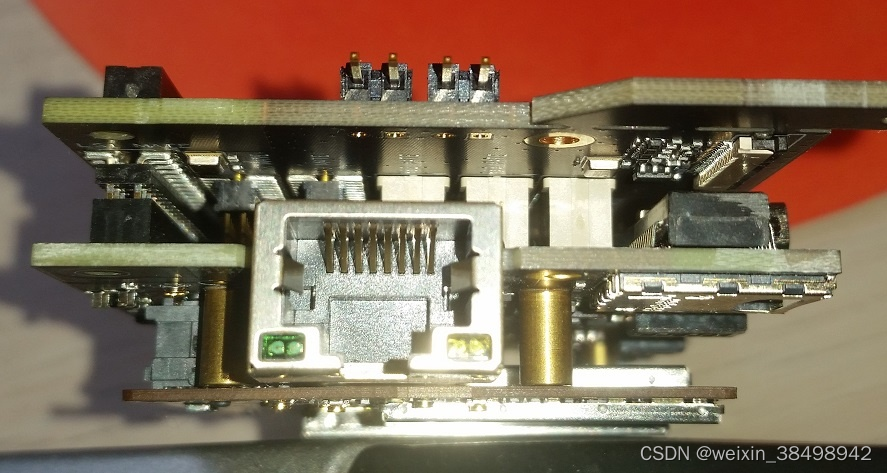
要组装 Qualcomm Robotics RB5 平台相机(不带支架),请执行以下操作:
-
将视觉夹层插入主板。
-
将跟踪摄像头传感器插入跟踪摄像头柔性电缆,然后插入视觉夹层上的 CAM1(跟踪摄像头)连接器。
-
将主摄像头传感器插入主摄像头柔性电缆,然后插入视觉夹层上的 CAM2(主摄像头)连接器。
警告
完全按照下图所示插入柔性电缆和摄像头;否则可能会造成损坏。















 926
926











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









