







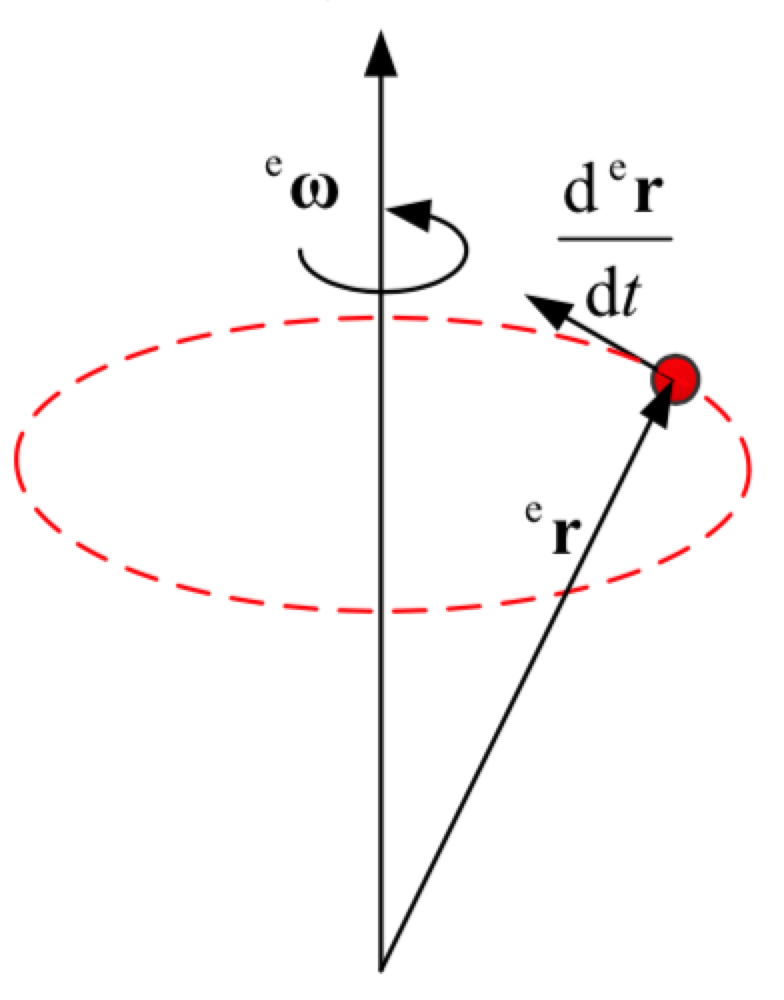
假设只发生旋转,下标e表示地球系,下标b表示机体系。
反对称矩阵的表示方法
a
×
b
=
[
a
]
×
b
a \times b = [a]_{\times}b
a×b=[a]×b
其中:
[
a
]
×
=
[
0
−
a
z
a
y
a
z
0
−
a
x
−
a
y
a
x
0
]
[a]_{\times}=\left[ \begin{matrix} 0 & -a_z & a_y \\ a_z & 0 & -a_x \\ -a_y & a_x & 0 \end{matrix} \right]
[a]×=⎣⎡0az−ay−az0axay−ax0⎦⎤
公理
d
r
e
⃗
d
t
=
ω
e
⃗
×
r
e
⃗
\frac{d\vec{r_e}}{dt}=\vec{\omega_e} \times \vec{r_e}
dtdre=ωe×re
推导
将旋转矩阵看成3个地球系表达的列向量的组合
d
R
b
e
d
t
=
d
[
b
1
e
⃗
b
2
e
⃗
b
3
e
⃗
]
d
t
=
[
ω
e
⃗
×
b
1
e
⃗
ω
e
⃗
×
b
2
e
⃗
ω
e
⃗
×
b
3
e
⃗
]
=
[
(
R
b
e
ω
b
⃗
)
×
b
1
e
⃗
(
R
b
e
ω
b
⃗
)
×
b
2
e
⃗
(
R
b
e
ω
b
⃗
)
×
b
3
e
⃗
]
=
[
(
R
b
e
ω
b
⃗
)
×
(
R
b
e
e
1
⃗
)
(
R
b
e
ω
b
⃗
)
×
(
R
b
e
e
2
⃗
)
(
R
b
e
ω
b
⃗
)
×
(
R
b
e
e
3
⃗
)
]
\frac{d{R_b^e}}{dt}=\frac{d[\vec{b_1^e}\quad\vec{b_2^e}\quad\vec{b_3^e}]}{dt}=[\vec{\omega_e} \times \vec{b_1^e} \quad \vec{\omega_e} \times \vec{b_2^e} \quad \vec{\omega_e} \times \vec{b_3^e}]\\=[(R_b^e\vec{\omega_b}) \times \vec{b_1^e} \quad (R_b^e\vec{\omega_b}) \times \vec{b_2^e} \quad (R_b^e\vec{\omega_b}) \times \vec{b_3^e}]\\=[(R_b^e\vec{\omega_b}) \times (R_b^e\vec{e_1}) \quad (R_b^e\vec{\omega_b}) \times (R_b^e\vec{e_2}) \quad (R_b^e\vec{\omega_b}) \times (R_b^e\vec{e_3})]
dtdRbe=dtd[b1eb2eb3e]=[ωe×b1eωe×b2eωe×b3e]=[(Rbeωb)×b1e(Rbeωb)×b2e(Rbeωb)×b3e]=[(Rbeωb)×(Rbee1)(Rbeωb)×(Rbee2)(Rbeωb)×(Rbee3)]
其中:
e
1
⃗
=
[
1
0
0
]
T
\vec{e_1}=[1\quad0\quad0]^T
e1=[100]T
e
2
⃗
=
[
0
1
0
]
T
\vec{e_2}=[0\quad1\quad0]^T
e2=[010]T
e
3
⃗
=
[
0
0
1
]
T
\vec{e_3}=[0\quad0\quad1]^T
e3=[001]T
对于旋转矩阵
R
R
R和向量叉乘,有以下性质(本文不证明了,有兴趣的可以自己推导)
(
R
a
⃗
)
×
(
R
b
⃗
)
=
R
(
a
⃗
×
b
⃗
)
(R\vec{a}) \times (R\vec{b})=R(\vec{a} \times \vec{b})
(Ra)×(Rb)=R(a×b)
应用该性质得到:
d
R
b
e
d
t
=
[
R
b
e
(
ω
b
⃗
×
e
1
⃗
)
R
b
e
(
ω
b
⃗
×
e
2
⃗
)
R
b
e
(
ω
b
⃗
×
e
3
⃗
)
]
=
R
b
e
[
ω
b
⃗
×
e
1
⃗
ω
b
⃗
×
e
2
⃗
ω
b
⃗
×
e
3
⃗
]
=
R
b
e
[
[
ω
b
⃗
]
×
e
1
⃗
[
ω
b
⃗
]
×
e
2
⃗
[
ω
b
⃗
]
×
e
3
⃗
]
=
R
b
e
[
ω
b
⃗
]
×
\frac{d{R_b^e}}{dt}=[R_b^e(\vec{\omega_b} \times \vec{e_1}) \quad R_b^e(\vec{\omega_b} \times \vec{e_2}) \quad R_b^e(\vec{\omega_b} \times \vec{e_3})]\\=R_b^e[\vec{\omega_b} \times \vec{e_1} \quad \vec{\omega_b} \times \vec{e_2} \quad \vec{\omega_b} \times \vec{e_3}]\\=R_b^e[[\vec{\omega_b}]_{\times} \vec{e_1} \quad [\vec{\omega_b}]_{\times} \vec{e_2} \quad [\vec{\omega_b}]_{\times} \vec{e_3}]\\=R_b^e[\vec{\omega_b}]_{\times}
dtdRbe=[Rbe(ωb×e1)Rbe(ωb×e2)Rbe(ωb×e3)]=Rbe[ωb×e1ωb×e2ωb×e3]=Rbe[[ωb]×e1[ωb]×e2[ωb]×e3]=Rbe[ωb]×
综上所述:
d
R
b
e
d
t
=
R
b
e
[
ω
b
⃗
]
×
\frac{d{R_b^e}}{dt}=R_b^e[\vec{\omega_b}]_{\times}
dtdRbe=Rbe[ωb]×

















 3078
3078

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









