










概述
PiecewiseBrakingTrajectoryGenerator类是apollo planning模块下modules\planning\lattice\trajectory_generation\piecewise_braking_trajectory_generator.cc/.h实现
从类名来看,应该是PiecewiseBrakingTrajectoryGenerator分段匀减速刹停轨迹生成器类?
从代码来看PiecewiseBrakingTrajectoryGenerator类主要是实现:
1.根据当前车速,纵向位置,目标车速,需要到达的纵向位置计算出一条纵向分段匀减速刹停轨迹,分成4种情况;
//a.距离不够,直接以当前车速刹停至目标点;
//b.先舒适的减速至目标速度巡航一段时间,再舒适的减速刹停停在目标s上;(初始速度大于目标速度)
//c.先舒适的加速至目标速度,巡航一段时间,再刹停(初始速度小于目标速度)
//d.先舒适的加速至最大速度,再刹停(初始速度小于目标速度,纵向长度没办法实现完整的梯形速度规划)
2. 为了实现1的功能,写了一些辅助函数ComputeStopDistance根据加速度,速度计算刹停距离;ComputeStopDeceleration根据距离,速度反推刹停需要的减速度;
简而言之,就是计算一条刹停纵向轨迹
piecewise_braking_trajectory_generator.h
#pragma once
#include <memory>
#include "modules/planning/common/trajectory1d/piecewise_acceleration_trajectory1d.h"
namespace apollo {
namespace planning {
class PiecewiseBrakingTrajectoryGenerator {
public:
PiecewiseBrakingTrajectoryGenerator() = delete;
//PiecewiseBrakingTrajectoryGenerator类的主要函数,Genearate()生成分段刹车轨迹的函数?
//其实就是输入当前状态(纵向位置,车速),需要停在的纵向位置来计算纵向的轨迹,分成几种情况:
//a.距离不够,直接以当前车速刹停至目标点;
//b.先舒适的减速至目标速度巡航一段时间,再舒适的减速刹停停在目标s上;(初始速度大于目标速度)
//c.先舒适的加速至目标速度,巡航一段时间,再刹停(初始速度小于目标速度)
//d.先舒适的加速至最大速度,再刹停(初始速度小于目标速度,纵向长度没办法实现完整的梯形速度规划)
//输入参数:目标纵向位置s_target,当前车辆的纵向位置s_curr,目标车速v_target,当前车速v_curr,舒适加速度a_comfort? 舒适的减速度d_comfort?最大时间max_time(指轨迹的时间长度,planning_gflags里trajectory_time_length配置为8.0s)?
static std::shared_ptr<Curve1d> Generate(
const double s_target, const double s_curr, const double v_target,
const double v_curr, const double a_comfort, const double d_comfort,
const double max_time);
//计算刹停距离,输入v和减速度dec, v^2/2a
static double ComputeStopDistance(const double v, const double dec);
//根据刹停距离和初始速度反推减速度
//a=v^2/(2x)
static double ComputeStopDeceleration(const double dist, const double v);
};
} // namespace planning
} // namespace apollo
piecewise_braking_trajectory_generator.cc
#include "modules/planning/lattice/trajectory_generation/piecewise_braking_trajectory_generator.h"
#include <cmath>
#include "cyber/common/log.h"
namespace apollo {
namespace planning {
//PiecewiseBrakingTrajectoryGenerator类的主要函数,Genearate()生成分段刹车轨迹的函数?
//其实就是输入当前状态(纵向位置,车速),需要停在的纵向位置来计算纵向的轨迹,分成几种情况:
//a.距离不够,直接以当前车速刹停至目标点;
//b.先舒适的减速至目标速度巡航一段时间,再舒适的减速刹停停在目标s上;(初始速度大于目标速度)
//c.先舒适的加速至目标速度,巡航一段时间,再刹停(初始速度小于目标速度)
//d.先舒适的加速至最大速度,再刹停(初始速度小于目标速度,纵向长度没办法实现完整的梯形速度规划)
//输入参数:目标纵向位置s_target,当前车辆的纵向位置s_curr,目标车速v_target,当前车速v_curr,舒适加速度a_comfort? 舒适的减速度d_comfort?最大时间max_time(指轨迹的时间长度,planning_gflags里trajectory_time_length配置为8.0s)?
std::shared_ptr<Curve1d> PiecewiseBrakingTrajectoryGenerator::Generate(
const double s_target, const double s_curr, const double v_target,
const double v_curr, const double a_comfort, const double d_comfort,
const double max_time) {
//首先创建一个共享指针,分段匀加速1维轨迹类,用当前纵向位置和速度去初始化这个类对象ptr_trajectory
std::shared_ptr<PiecewiseAccelerationTrajectory1d> ptr_trajectory =
std::make_shared<PiecewiseAccelerationTrajectory1d>(s_curr, v_curr);
//计算要走过的纵向距离,用纵向目标位置减去当前的纵向位置
double s_dist = s_target - s_curr;
//计算舒适的刹停距离?输入当前车速和舒适的减速度作为参数
double comfort_stop_dist = ComputeStopDistance(v_curr, d_comfort);
// if cannot stop using comfort deceleration, then brake in the beginning.
//如果用舒适的减速度无法在规定的纵向距离内完成降速,那么一开始就刹车?
//如果舒适的减速完成距离>要求的减速完成距离(至少不能超过纵向目标位置)
if (comfort_stop_dist > s_dist) {
//这是从要求的减速距离s_dist,以及当前车速反推刹停需要的减速度
double stop_d = ComputeStopDeceleration(s_dist, v_curr);
//计算出刹停需要的时间
double stop_t = v_curr / stop_d;
//在轨迹里初始s,v之后增加一段以反推的减速度刹停的这一段纵向轨迹
ptr_trajectory->AppendSegment(-stop_d, stop_t);
//若刹停的的时间小于轨迹需要的时间长度8s,就在该轨迹后面增加一段加速度为0的轨迹填补剩下的时间
if (ptr_trajectory->ParamLength() < max_time) {
ptr_trajectory->AppendSegment(0.0,
max_time - ptr_trajectory->ParamLength());
}
//返回这个分段匀减速刹车轨迹(该情况下必须从一开始就刹车,而且是以不舒适的减速度刹停)
return ptr_trajectory;
}
// otherwise, the vehicle can stop from current speed with comfort brake.
//车辆可以以舒服的减速度减速至目标速度的话
//如果当前车速大于目标车速
if (v_curr > v_target) {
//计算巡航时间,也就是减速至目标速度后匀速运动的时间
//用从当前纵向位置到目标纵向位置的总的距离 - 舒适的减速至目标速度的距离 = 剩下的需要匀速运动完成的距离,剩下的需要匀速运动完成的距离 / 目标速度 = 匀速巡航时间
double t_cruise = (s_dist - comfort_stop_dist) / v_target;
//计算舒适的减速至目标速度需要的时间
double t_rampdown = (v_curr - v_target) / d_comfort;
//这个是计算目标速度再以舒适的减速度刹停需要的时间?
double t_dec = v_target / d_comfort;
//在分段匀减速轨迹里,在初始的s和速度之后增加一段以舒适的减速度-2m/s^2减少至目标速度的轨迹
ptr_trajectory->AppendSegment(-d_comfort, t_rampdown);
//在分段匀减速轨迹里,在减速至目标速度后再增加一段匀速巡航的轨迹
ptr_trajectory->AppendSegment(0.0, t_cruise);
//最后增加一段以舒服的减速度刹停的减速段轨迹
ptr_trajectory->AppendSegment(-d_comfort, t_dec);
//如果这一通操作下来,待设置的分段匀减速刹停轨迹时间还是小于8s,用加速度0去填补剩下的时间,直到轨迹的时间达到8s
if (ptr_trajectory->ParamLength() < max_time) {
ptr_trajectory->AppendSegment(0.0,
max_time - ptr_trajectory->ParamLength());
}
//返回这个分段匀减速刹停轨迹(该情况下先舒适的减速至目标速度巡航一段时间,再舒适的减速刹停停在目标s上,另外apollo里定义的舒适减速度是-2m/s^2)
return ptr_trajectory;
} else {
//如果当前车速小于目标车速
//反过来计算以当前车速以舒适的加速度2m/s^2(apollo里定义的,实际上也并不能算舒适)到目标速度的加速时间
double t_rampup = (v_target - v_curr) / a_comfort;
//以目标速度舒适的减速至当前车速的时间t_rampdown
double t_rampdown = (v_target - v_curr) / d_comfort;
//这是 车辆先匀加速至目标速度,再匀减速至当前初始车速的距离,加减速的距离总长s_ramp
double s_ramp = (v_curr + v_target) * (t_rampup + t_rampdown) * 0.5;
//计算需要走过的纵向距离 - 加减速走过的距离 - 从当前车速出发舒适的刹停距离
//剩下的距离就是需要保持目标车速匀速行驶的距离
double s_rest = s_dist - s_ramp - comfort_stop_dist;
//如果计算出的剩下的保持目标车速匀速行驶的距离是 > 0的话
if (s_rest > 0) {
//计算巡航时间
double t_cruise = s_rest / v_target;
//计算从目标速度刹停的时间
double t_dec = v_target / d_comfort;
// construct the trajectory
//构建这条轨迹
//在待设置的分段匀减速刹停轨迹里在初始状态(当前车速,当前纵向位置)后新增一段
//舒适匀加速到目标速度的轨迹
ptr_trajectory->AppendSegment(a_comfort, t_rampup);
//新增一段以目标速度巡航的轨迹
ptr_trajectory->AppendSegment(0.0, t_cruise);
//新增一段从目标速度开始刹停的轨迹
ptr_trajectory->AppendSegment(-d_comfort, t_dec);
//如果轨迹的时间长度小于8s就在刹停后补全一段速度为0加速度为0的轨迹到8s
if (ptr_trajectory->ParamLength() < max_time) {
ptr_trajectory->AppendSegment(0.0,
max_time - ptr_trajectory->ParamLength());
}
//返回这个分段匀减速刹停轨迹(该情况下先舒适的加速至目标速度,巡航一段时间,再刹停)
return ptr_trajectory;
} else { //如果计算出的剩下的保持目标车速匀速行驶的距离是 <= 0的话,
//就说明不需要匀速段,直接从当前车速舒适加速至最多目标车速,再舒适的刹停
double s_rampup_rampdown = s_dist - comfort_stop_dist;
//计算从当前车速舒适加速的最大速度
double v_max = std::sqrt(v_curr * v_curr + 2.0 * a_comfort * d_comfort *
s_rampup_rampdown /
(a_comfort + d_comfort));
//计算加速的时间
double t_acc = (v_max - v_curr) / a_comfort;
//计算舒适减速的时间
double t_dec = v_max / d_comfort;
// construct the trajectory
//构建这段分段匀减速刹停轨迹
//再当前状态后增加一段 舒适加速至最大速度的轨迹
ptr_trajectory->AppendSegment(a_comfort, t_acc);
//再增加一段舒适减速至0的轨迹
ptr_trajectory->AppendSegment(-d_comfort, t_dec);
//轨迹上不满8s,加速度为0,速度为0补全至8s
if (ptr_trajectory->ParamLength() < max_time) {
ptr_trajectory->AppendSegment(0.0,
max_time - ptr_trajectory->ParamLength());
}
//返回这个分段匀减速刹停轨迹(该情况下先舒适的加速至最大速度,再刹停)
return ptr_trajectory;
}
}
}
//计算刹停距离,输入v和减速度dec, v^2/2a
double PiecewiseBrakingTrajectoryGenerator::ComputeStopDistance(
const double v, const double dec) {
ACHECK(dec > 0.0);
return v * v / dec * 0.5;
}
//根据刹停距离和初始速度反推减速度
//a=v^2/(2x)
double PiecewiseBrakingTrajectoryGenerator::ComputeStopDeceleration(
const double dist, const double v) {
return v * v / dist * 0.5;
}
} // namespace planning
} // namespace apollo
附录 apollo中默认定义的舒适加减速度
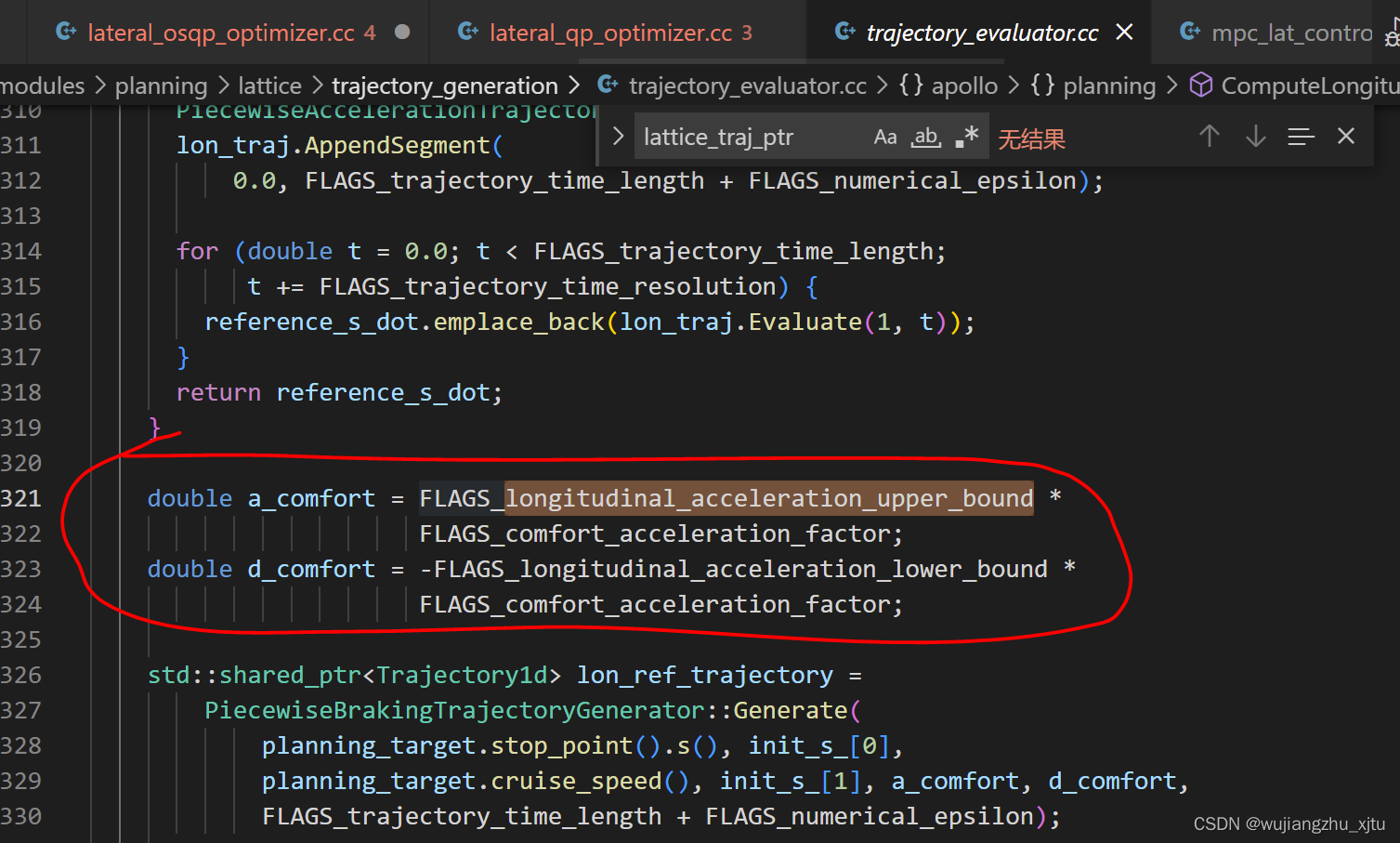
apollo里的舒适加速度和减速度都在planning_gflags里配置,定义最大加减速度为±4m/s2,然后舒适加减速度在最大值基础上乘以一个factor,这个factor同样在planning_gflags.cc里配置为0.5,也就是apollo里默认配置的舒适的加减速度为±2m/s2。















 1215
1215











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











