









一、简介
项目中常见的最常见的拟合一般多是拟合直线和拟合圆,但是我个人最初在自学halcon 的时候总是一看到类似直线的东西就直接拟合,一看到类似圆的东西就直接拟合圆,但是我们在做项目的时候要有很多的禁忌,要考虑到很多的东西,所以要让算法有更强的兼容性,下面我们来一起看一这个拟合直线如何拟合:
1、传入一张图片,和一个ROI
2、使用二维卡尺找出拟合直线的点(这一步很重要)
3、从第二步的点来拟合圆,但是我们会设点一个点到直线的最小距离,用这个距离来判断直线的拟合优越性,删除掉一些到跳点,防止一些个别点导致拟合直线不理想的问题
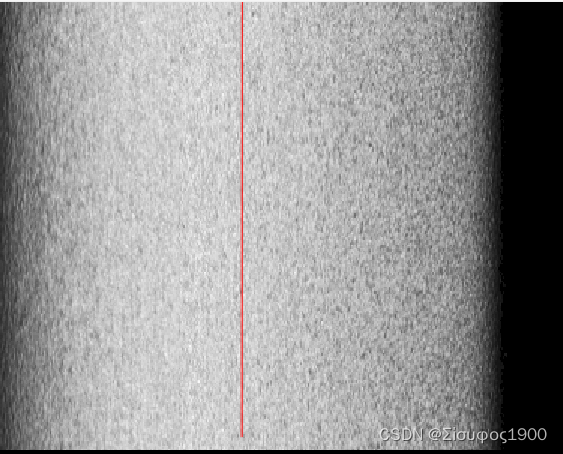
4、输出
从上面我们可以得到一条 或者多条直线,那如果是求出两条直线的中线,如何来求呢?
1 、首先传入两条中线
2、判断这两天直线的角度以及这两天直线是不是相交
3、如果相交,求直线上(线段的端点)在另外一条直线上的投影点,直接取中点,同理求另外一个端点的投影,求中点,连起来就是中线
4、如果有相交,那么这个就比较复杂点,首先我们要计算两个端点(直线出入的端点)到2 中计算得出的点到点的距离d1 d2
5、然后以2中的交点(假设r,c)r,c,d1 以及r,c,d2画圆,然后计算另外一条直线与这两个圆之间的交点
6、上图中的两个端点就是我们最想要的两个点
7、最后输出
二、拟合直线
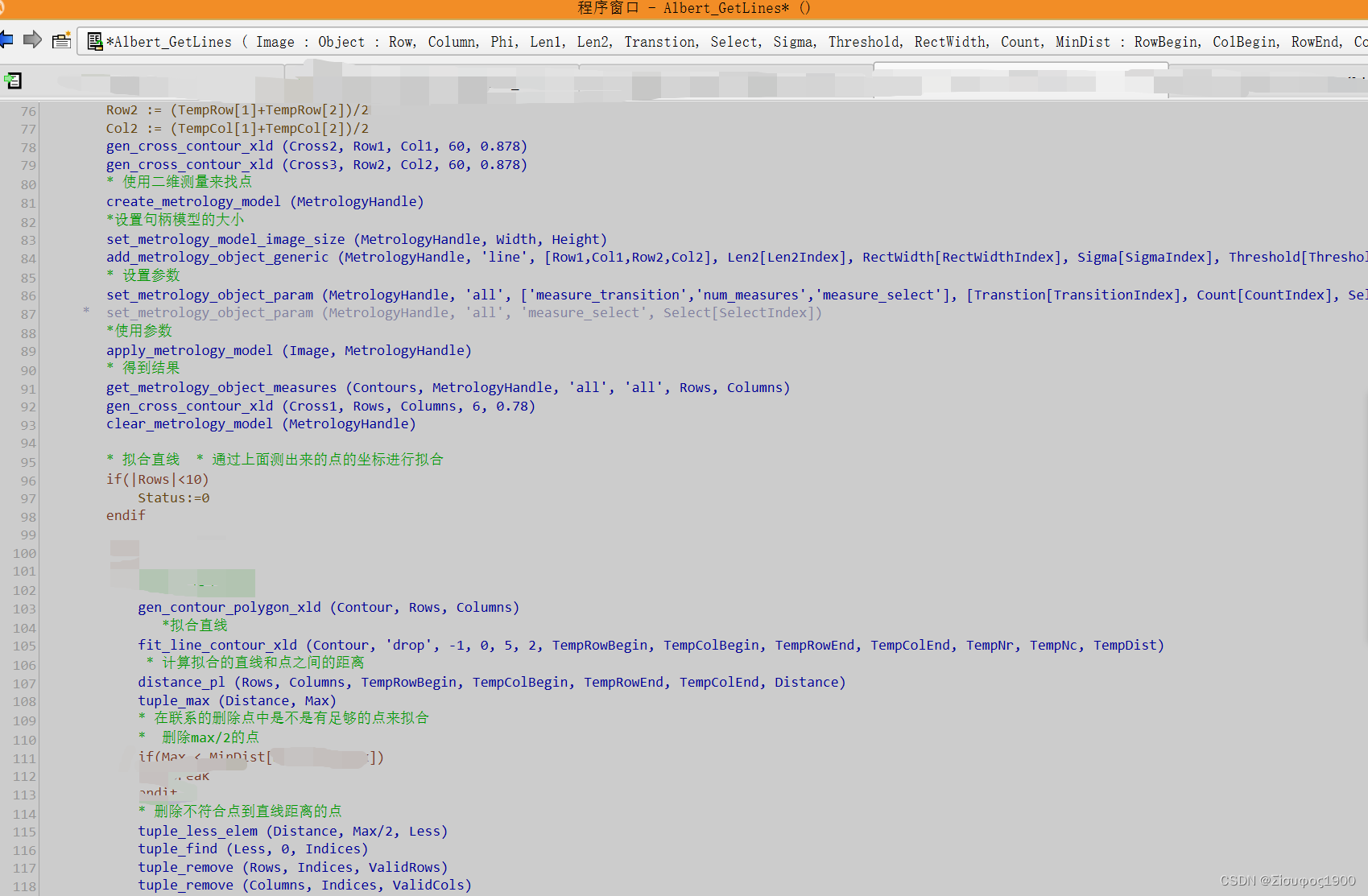
核心代码:
* 使用二维测量来找点
create_metrology_model (MetrologyHandle)
*设置句柄模型的大小
set_metrology_model_image_size (MetrologyHandle, Width, Height)
add_metrology_object_generic (MetrologyHandle, 'line', [Row1,Col1,Row2,Col2], Len2[Len2Index], RectWidth[RectWidthIndex], Sigma[SigmaIndex], Threshold[ThresholdIndex], [], [], temp)
* 设置参数
set_metrology_object_param (MetrologyHandle, 'all', ['measure_transition','num_measures','measure_select'], [Transtion[TransitionIndex], Count[CountIndex], Select[SelectIndex]])
* set_metrology_object_param (MetrologyHandle, 'all', 'measure_select', Select[SelectIndex])
*使用参数
apply_metrology_model (Image, MetrologyHandle)
* 得到结果
get_metrology_object_measures (Contours, MetrologyHandle, 'all', 'all', Rows, Columns)
gen_cross_contour_xld (Cross1, Rows, Columns, 6, 0.78)
clear_metrology_model (MetrologyHandle)
*拟合直线
fit_line_contour_xld (Contour, 'drop', -1, 0, 5, 2, TempRowBegin, TempColBegin, TempRowEnd, TempColEnd, TempNr, TempNc, TempDist)
* 计算拟合的直线和点之间的距离
distance_pl (Rows, Columns, TempRowBegin, TempColBegin, TempRowEnd, TempColEnd, Distance)
tuple_max (Distance, Max)
* 在联系的删除点中是不是有足够的点来拟合
* 删除max/2的点
if(Max < MinDist[MinDistIndex])
break
endif
* 删除不符合点到直线距离的点
tuple_less_elem (Distance, Max/2, Less)
tuple_find (Less, 0, Indices)
tuple_remove (Rows, Indices, ValidRows)
tuple_remove (Columns, Indices, ValidCols)三、获得中线
核心代码:
*求直线和圆的交叉点
gen_circle_contour_xld (ContCircle, Row, Column, Distance1, 0, 6.28318, 'positive', 1)
gen_circle_contour_xld (ContCircle2, Row, Column, Distance2, 0, 6.28318, 'positive', 1)
intersection_line_circle (line2[0], line2[1], line2[2], line2[3], Row, Column, Distance1, 0, 6.28318, 'positive', Row1, Column1)
intersection_line_circle (line2[0], line2[1], line2[2], line2[3], Row, Column, Distance2, 0, 6.28318, 'positive', Row2, Column2)
* 显示交点

















 273
273

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









