






【原文 链接】
【重点摘抄】
DomainParticipant: 用于跟踪其他实体和服务入口点的容器。在DDS中,所有应用程序在域内相互通信,从而促进隔离和通信优化。
Publisher: 发布是负责数据发布的对象。管理一个或多个DataWriters,发布将数据发送到一个或多个主题。
Subscriber: 订阅负责接收已发布的数据并使数据可用。订阅代表一个或多个DataReader行事。根据订阅,DomainParticipant可以接收和发送不同指定类型的数据。
DataWriter: DataWriter是DomainParticipant必须使用的对象,以通过Publisher发布数据。 DataWriter发布给定类型的数据。
DataReader: DataReader是附加到订阅服务器的对象。使用DataReader,DomainParticipant可以接收和访问其类型必须与DataWriter的类型相对应的数据。
Topic: 主题用于标识DataWriter和DataReader之间的每个数据对象。每个主题由名称和数据类型定义。
传输数据大小的范围是256 B到4 MB,因为大图像数据(例如, 2 MB)和点云数据(.pcd)经常用于ROS应用,例如自动驾驶系统。
虽然每个节点以10 Hz执行,但实验重复最多4 MB。给出了每个数据大小的100次测量获得的箱线图和中位数。
我们比较了三种DDS实现,即Connext [29],OpenSplice [25]和FastRTPS [14]。 Connext和OpenSplice是众所周知的商业许可证DDS实现。请注意,Connext还拥有研究许可证。
默认情况下,Connext使用UDPv4和共享内存来交换数据。
SCHED FIFO进程优先于任何非SCHED FIFO进程,即使用默认Linux调度的进程。使用mlockall,进程的虚拟地址空间在物理RAM中得到修复,从而防止将内存分页到交换区域。
ROS1和ROS2节点之间的通信需要一个ros_bridge [33],这是一个转换DDS主题的桥接节点。
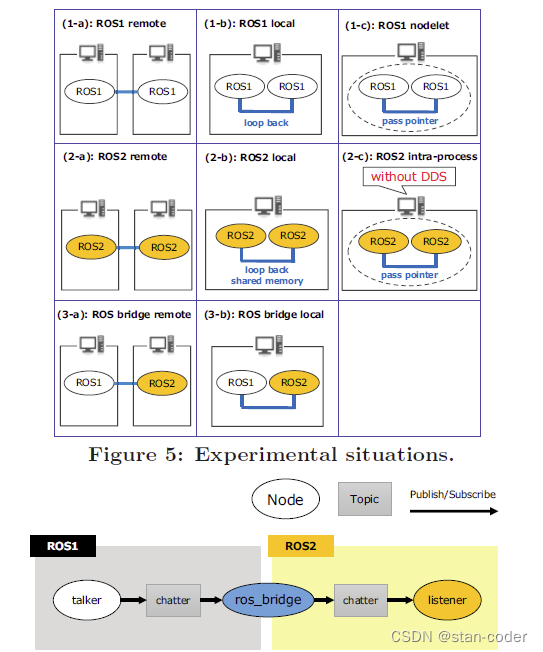
请注意,在使用ros_bridge时,唯一使用的是besteffort策略,因为ros_bridge不支持QoS策略中的RELIABLE策略。
在“初始丢失”列中,ROS1无法在节点首次发送消息时获取初始消息,即使ROS1使用具有256 B等小数据的TCPROS并且在发布节点开始发送之前启动了订阅节点消息。
相比之下,即使使用4 MB等大数据,ROS2也不会丢失初始消息。这证明了DDS的可靠性。
对于大数据,ROS2具有显着的开销,具体取决于数据的大小,如图10所示。(2-b)中ROS2的开销归因于两个因素,即DDS的数据转换和处理DDS。
随着片段数据大小的增加,端到端的延迟会降低。 对于大的片段大小,DDS不需要将大数据分成许多数据报,这意味着更少的系统调用和更少的开销。
从3.3节开始,延迟是由DDS和DDS事务的两次数据转换引起的。 DDS端到端延迟是恒定的,直到消息数据大小低于最大数据包大小(64 KB),如图9所示。
另一方面,当一条大消息被分成几个数据包时,延迟会急剧增加,因为显示在图10和图18中,消息数据大小是否超过64 KB是一个重要问题,尤其是在DDS中,因为管理具有QoS策略的分割数据包需要大量处理时间和某些供应商提供的备用API。
我们应该了解分组数据包的影响,并在使用DDS时牢记这个问题。虽然DDS和ROS2抽象具有开销延迟,但OpenSplice比Connext更快地利用了许多线程和进程。















 4525
4525











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









