







 本文详细介绍了如何在不同操作系统(Ubuntu16.04与Ubuntu18.04)及ROS版本(Kinetic与Melodic)间实现机器人操作系统(ROS)的通信。通过设置/etc/hosts文件及正确配置ROS_HOSTNAME与ROS_MASTER_URI环境变量,可以解决跨系统通信问题。
本文详细介绍了如何在不同操作系统(Ubuntu16.04与Ubuntu18.04)及ROS版本(Kinetic与Melodic)间实现机器人操作系统(ROS)的通信。通过设置/etc/hosts文件及正确配置ROS_HOSTNAME与ROS_MASTER_URI环境变量,可以解决跨系统通信问题。
在相同版本间的ROS进行通信不在赘述了,修改/etc/hosts文件即可。
最近项目遇到在Ubuntu16.04 与Ubuntu18.04两个系统间进行ROS通信,ROS版本分别为Kinetic和Melodic。配置网络后,两边都能够ping通,但是在获取ros数据是,却出现报错:

后面在ROS wiki上查询到相关解决方案:
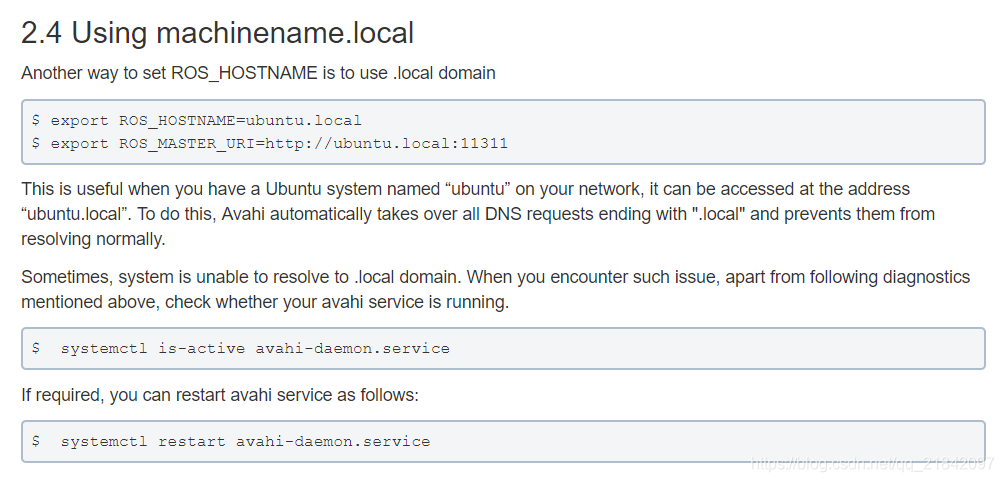
即:
Master: export ROS_HOSTNAME=hello(主机名称).local
Slave : export ROS_HOSTNAME=fine(客机名称).local
export ROS_MASTER_URI=http://hello(主机名称).local:11311
即可完成通信。


















 207
207

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











