








1.1 信息矩阵H的计算
对于每一条边都要进行这样两个for循环,分别是遍历方阵H的行和列,第一个i的for循环是行数,当遍历到行列相等,也就是对角的时候,只用放入一次hessian,而其他情况下都要放入关于对角对称的两个hessian,这是由于这两个位置的hessian是转置的关系。而b则在行遍历的时候一行行填入。
MatXX hessian = JtW * jacobian_j;
// 所有的信息矩阵叠加起来
// TODO:: home work. 完成 H index 的填写.
H.block(index_i,index_j, dim_i, dim_j).noalias() += hessian;
if (j != i) {
// 对称的下三角
// TODO:: home work. 完成 H index 的填写.
H.block(index_j,index_i, dim_j, dim_i).noalias() += hessian.transpose();
} 1.2. SLAM问题的求解
将问题转换成normal equation,其中,
H
p
p
H_{pp}
Hpp表示相机位姿之间的关系,下图中
H
l
l
H_{ll}
Hll对应代码中的
H
m
m
H_{mm}
Hmm表示路标点之间的关系,
H
p
l
H_{pl}
Hpl对应代码中的
H
p
m
H_{pm}
Hpm表示相机和路标之间的关系。

矩阵块的取值:
// TODO:: home work. 完成矩阵块取值,Hmm,Hpm,Hmp,bpp,bmm:landmark
MatXX Hmm = Hessian_.block(reserve_size,reserve_size, marg_size, marg_size);
MatXX Hmp = Hessian_.block(reserve_size,0, marg_size, reserve_size);
MatXX Hpm = Hessian_.block(0,reserve_size,reserve_size, marg_size);
VecX bmm = b_.segment(reserve_size,marg_size );
VecX bpp = b_.segment(0,reserve_size);完成舒尔补代码:
// TODO:: home work. 完成舒尔补 Hpp, bpp 代码
MatXX tempH = Hpm * Hmm_inv;
H_pp_schur_ = Hessian_.block(0,0,reserve_size,reserve_size) - tempH * Hmp;
b_pp_schur_ = bpp - tempH * bmm;求解路标点 δ x l \delta x_l δxl:
// TODO:: home work. step3: solve landmark
VecX delta_x_ll(marg_size);
delta_x_ll = Hmm_inv * (bmm - Hmp * delta_x_pp) ;
delta_x_.tail(marg_size) = delta_x_ll; // x_ll 路标点信息- 滑动窗口算法测试函数

其信息矩阵为:
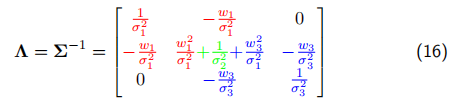
现在要从这个例子中marg掉
x
2
x_2
x2(绿色部分),求解之后的信息矩阵。需要将绿色部分移动到信息矩阵的右下角,具体操作为先二、三行互换,再二、三列互换。然后进行舒尔补运算,marg掉
x
2
x_2
x2。
// 将 row i 移动矩阵最下面
Eigen::MatrixXd temp_rows = H_marg.block(idx, 0, dim, reserve_size); //第二行
Eigen::MatrixXd temp_botRows = H_marg.block(idx + dim, 0, reserve_size - idx - dim, reserve_size); // 第三行
H_marg.block(idx, 0,reserve_size - idx - dim, reserve_size) = temp_botRows; // 二、三行颠倒
H_marg.block(reserve_size - dim, 0, dim, reserve_size) = temp_rows;舒尔补运算:
// TODO:: home work. 完成舒尔补操作
Eigen::MatrixXd Arm = H_marg.block(0,n2,n2,m2);
Eigen::MatrixXd Amr = H_marg.block(n2,0,m2,n2);
Eigen::MatrixXd Arr = H_marg.block(0,0,n2,n2);
Eigen::MatrixXd tempB = Arm * Amm_inv;
Eigen::MatrixXd H_prior = Arr - tempB * Amr;编译说明:
cd BA_schur \\ 进入文件夹
mkdir build
cd build
cmake ..
make -j4
cd app
./testMonoBA
运行结果如下:


【提升题】论文总结
在我的另一篇博客,指路
另,关于BA的相关代码解析在我的另一篇博客——指路















 704
704











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









