







ORB_SLAM2官方开源:https://github.com/raulmur/ORB_SLAM2
一、编译
我的环境:
- Ubuntu22.04LTS
- Opencv4.6编译
- Pangolin0.5编译,一定要用0.5版本
- eigen3.4.0,没有编译,用apt-get装的,在/usr/include/eigen3中可以找到
编译的时候也是一堆问题,大概主要是以下几个报错:
问题一:FATAL_ERROR "OpenCV > 2.4.3 not found.
- 问题一解决:修改cmakelist.txt,将opencv3.0改为4.6.0,两个地方,一个是orbslam2文件夹,另一个是DBoW2文件夹,根据编译报错提示修改。
find_package(OpenCV 4.6.0 QUIET)
if(NOT OpenCV_FOUND)
find_package(OpenCV 2.4.3 QUIET)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 2.4.3 not found.")
endif()
endif()
问题二:‘usleep’ was not declared in this scope
- 问题二解决:在以下文件中添加头文件#include<unistd.h>
/src/LocalMapping.cc
/src/System.cc
/src/LoopClosing.cc
/src/Tracking.cc
/src/Viewer.cc
/Examples/Monocular/mono_tum.cc
/Examples/Monocular/mono_kitti.cc
/Examples/Monocular/mono_euroc.cc
/Examples/RGB-D/rgbd_tum.cc
/Examples/Stereo/stereo_kitti.cc
/Examples/Stereo/stereo_euroc.cc
问题三:std::map must have the same value_type as its allocator
- 问题三解决:修改
ORB_SLAM2/include/LoopClosing.h::50中的语句
# 原语句
typedef map<KeyFrame*,g2o::Sim3,std::less<KeyFrame*>,
Eigen::aligned_allocator<std::pair<const KeyFrame*, g2o::Sim3> > > KeyFrameAndPose;
# 修改成如下
typedef map<KeyFrame*,g2o::Sim3,std::less<KeyFrame*>,
Eigen::aligned_allocator<std::pair<KeyFrame* const, g2o::Sim3> > > KeyFrameAndPose;
问题四:CV_LOAD_IMAGE_UNCHANGED未定义
- 问题四解决:在VS code中打开ORB_SLAM2文件夹作为工作空间,搜索CV_LOAD_IMAGE_UNCHANGED,将其全部换为cv::IMREAD_UNCHANGED即可。
# 下面三个文件中每个有一处CV_LOAD_IMAGE_UNCHANGED
/Examples/Monocular/mono_euroc.cc
/Examples/Monocular/mono_kitti.cc
/Examples/Monocular/mono_tum.cc
# 下面三个文件中每个有两处CV_LOAD_IMAGE_UNCHANGED
/Examples/RGB-D/rgbd_tum.cc
/Examples/Stereo/stereo_euroc.cc
/Examples/Stereo/stereo_kitti.cc
然后编译就可以通过了,但是有很多eigen的warning,我的eigen版本是3.4.0,据网友说3.2的版本可以消除warning,但由于是warning也可以通过编译,就没折腾了。
二、运行
EuRoC双目数据集
1.下载数据集:ASL格式的EuRoC数据集
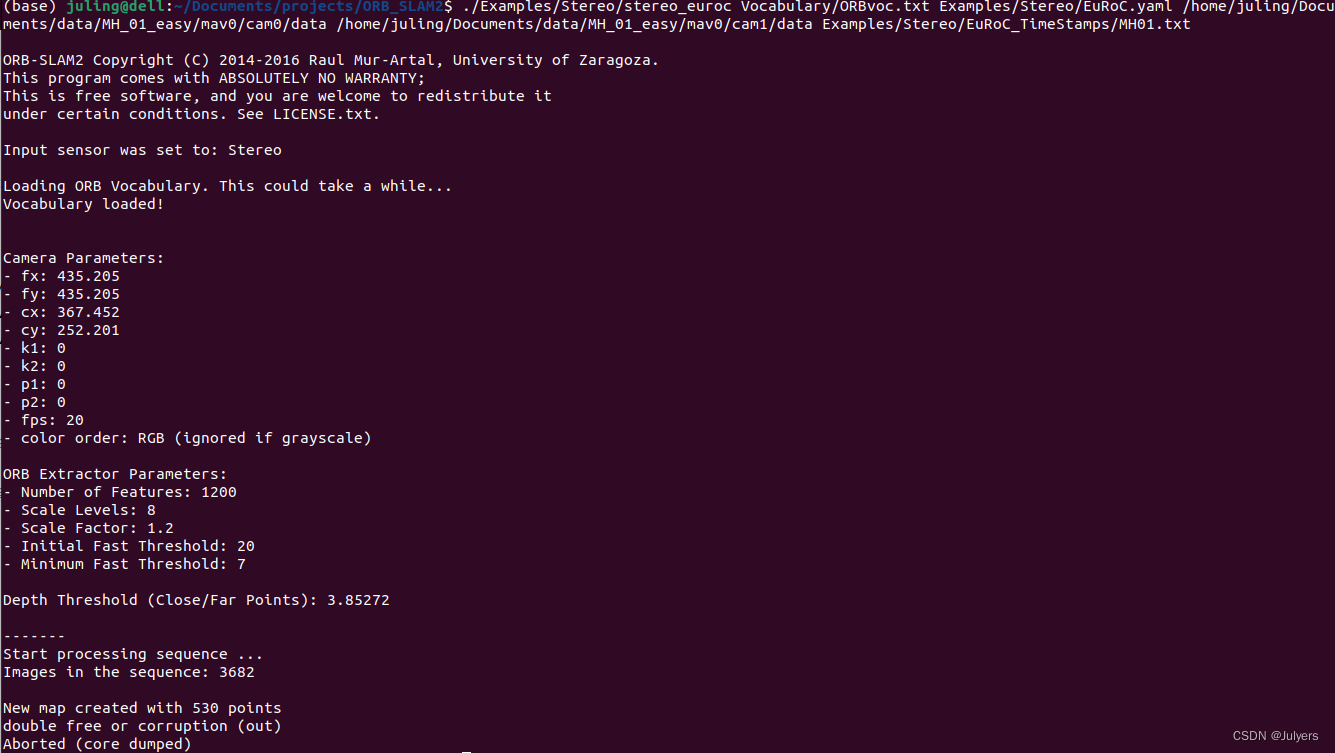
2.运行命令:
./Examples/Stereo/stereo_euroc Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml /home/juling/Documents/data/MH_01_easy/mav0/cam0/data /home/juling/Documents/data/MH_01_easy/mav0/cam1/data Examples/Stereo/EuRoC_TimeStamps/MH01.txt
- 这里我运行的是双目。
- 链接中有好几个数据集,我下载的是MH_01_easy,那么除了命令中数据集的路径要更改以外,对应的时间戳txt文件也要修改。
- 在
/Examples/Stereo/EuRoC_TimeStamps中有所有的txt。
最关键的问题来了,运行时出现了double free or corruption (out) Aborted (core dumped)的报错。
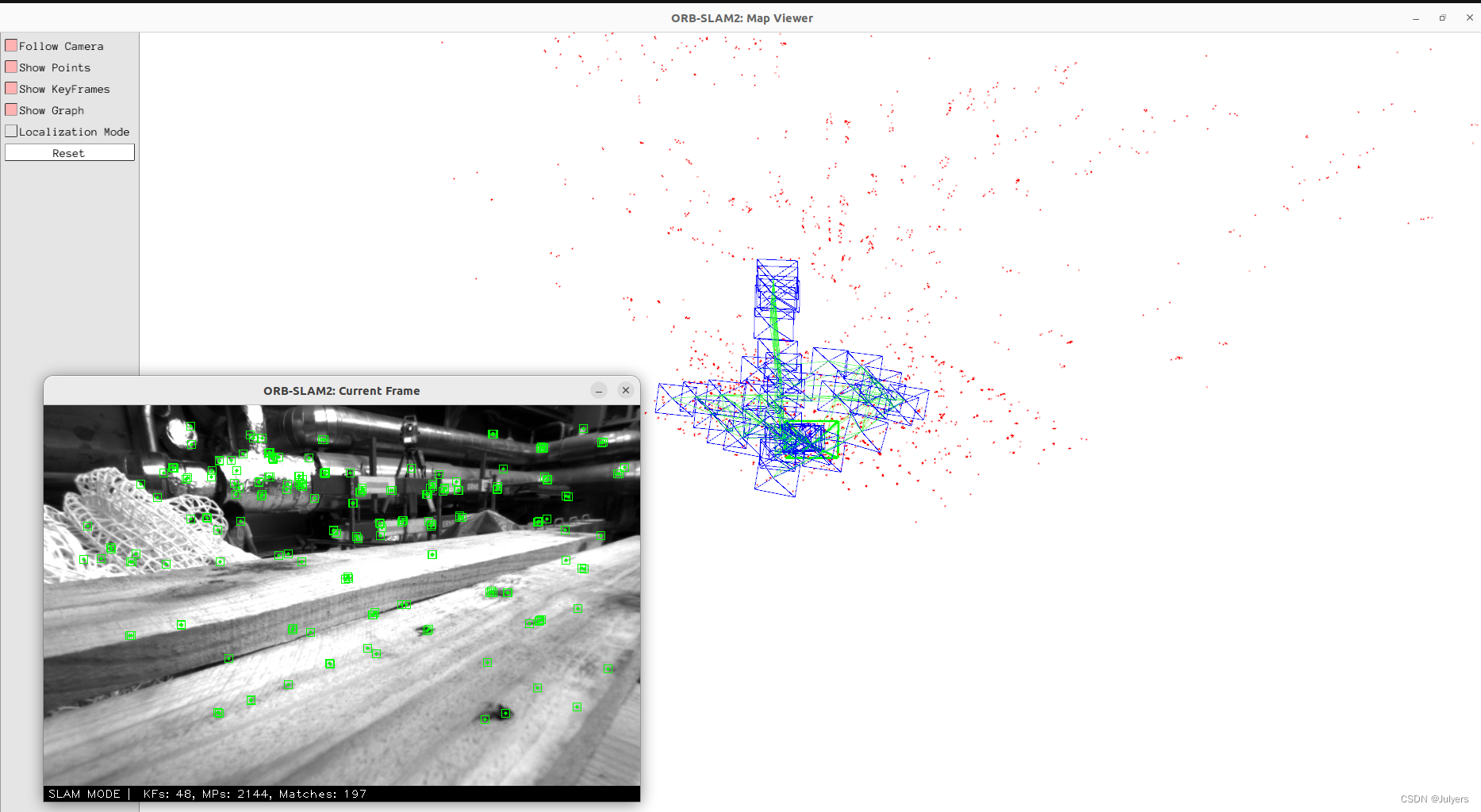
解决:查看build.sh脚本,发现它编译了DBoW2、编译了g2o、以及ORB_SLAM2三个文件,将它们CMakeLists.txt中包含-march=native的命令都找出来,删除-march=native重新编译即可。
# 原语句
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3 -march=native ")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3 -march=native")
# 修改语句
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3")
Map Viewer运行结果如下:
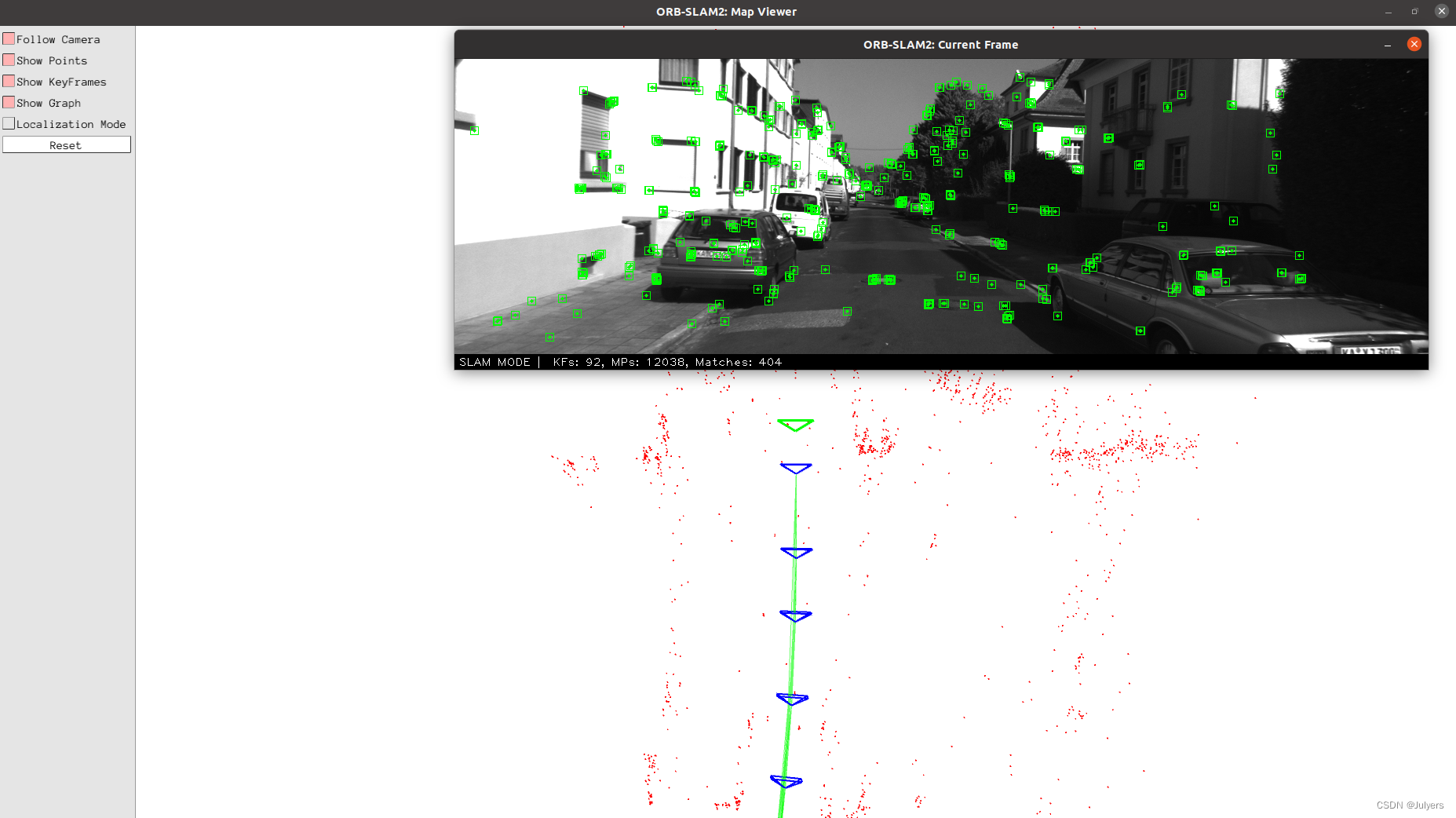
Kitti双目运行
- 下载:odometry data set (grayscale, 22 GB)包含了21个Sequence数据,测试只用1个即可,下面是网友提供的kitti00数据。
- kitti官网:https://www.cvlibs.net/datasets/kitti/eval_odometry.php
- kitti00数据集:https://pan.baidu.com/s/16mQavZst9iqA3EFMaL4o-w?pwd=qocp(来源:博客。另外这一篇博客有一些kitti数据评价详细介绍,记录一下)
- 运行命令
./Examples/Stereo/stereo_kitti Vocabulary/ORBvoc.txt Examples/Stereo/KITTI00-02.yaml /home/juling/Documents/data/kitti00/dataset/sequences/00/
Map Viewer运行结果如下:














 1201
1201











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









