






1、查看rosbag的信息
rosbag info xx.bag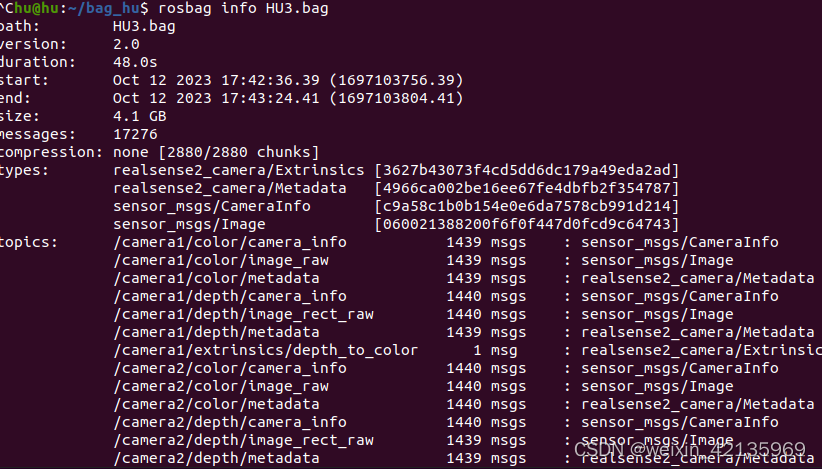
若只需要.bag中的某一段时间,可以按照时间截取bag包
rosbag filter 原始包名.bag 截取后的包名.bag "t.to_sec() > 开始时间 and t.to_sec() < 结束时间“
2、解析.bag文件到.jpg文件
安装如下依赖项
sudo apt-get install mjepgtools
sudo apt-get install ffmpeg报错 :E: 无法定位软件包 mjepgtools
解决:E: 无法定位软件包 mjepgtools-CSDN博客
新建终端,执行 roscore
选定存储图片的文件夹,在文件夹下新建终端执行:
rosrun image_view extract_images _sec_per_frame:=0.05 image:=<your topic>
# _sec_per_frame:=0.05 是截取图片的时间间隔进入rosbag所在的文件目录下,新建终端,回放rosbag包,其中的0.5是指以0.5倍速回放
rosbag play -r 0.5 <bag file>3、解析.bag文件到.pcd点云数据文件
两种方法
1.rosrun pcl_ros bag_to_pcd <xx.bag> <topic> <output_directory>
2.rosrun pcl_ros pointcloud_to_pcd input:=<topic>














 4358
4358











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









