







参考文献:
http://wiki.ros.org/velodyne/Tutorials/Getting%20Started%20with%20the%20Velodyne%20VLP16
https://blog.csdn.net/zz2862625432/article/details/78112707
https://blog.csdn.net/GroundWalker/article/details/84331527
环境:ubuntu16.04,VLP-16激光雷达,kinetic包
1. 安装驱动
sudo apt-get install ros-kinetic-velodyne
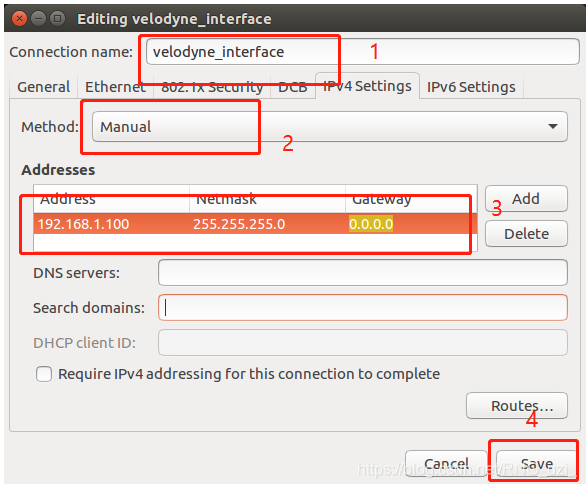
2. 配置网络,连接到激光雷达,(不需要关闭无线):
修改有线网络里面的ipv4:( 改为手动)
IP地址192.168.1.77,子网掩码255.255.255.0,网关192.168.1.1。
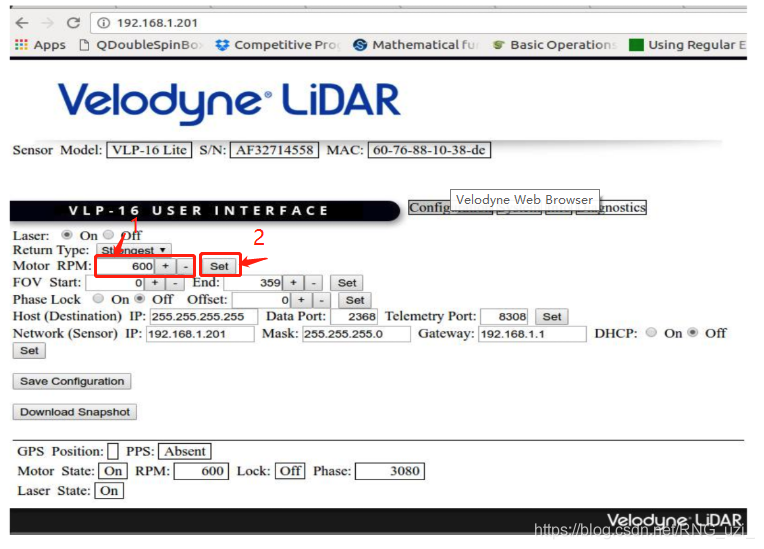
( 上面设置好之后,连接该无线,此时会断网)然后接入激光雷达,打开浏览器输入192.168.1.201可以看到激光雷达的配置文件。
每
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









