






Ubuntu18 基于ROS启动单目SLAM:
首先,编译ORM_SLAM,编译功能包(配置ROS环境)。这个在我之前文章中有介绍过,已经完成。(如编译有问题,可以直接下载ubuntu镜像:百度网盘 请输入提取码)
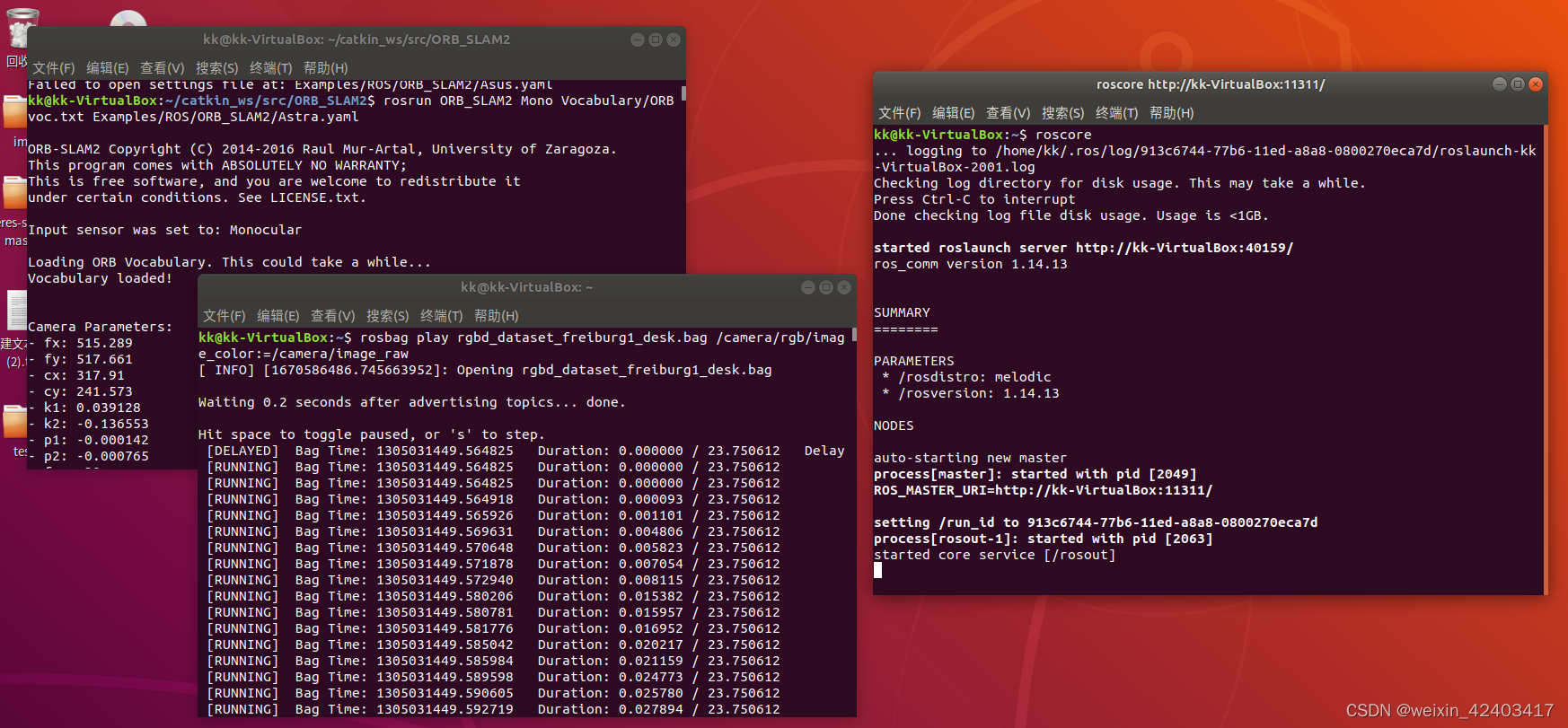
以上工作完成后,分别打开三个终端运行下面的三个命令:
$ roscore
# 进入ORB_SLAM2目录下启动Mono功能节点。
# 看到开启的等待数据的可视化建图界面
$ rosrun ORB_SLAM2 Mono Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Astra.yaml
# 进入数据包所在目录下,运行命令
# /camera/image_raw表示播放的数据要发布的话题名称,此时可以在界面中看到建图的效果
$ rosbag play rgbd_dataset_freiburg1_desk.bag /camera/rgb/image_color:=/camera/image_raw
如图所示:
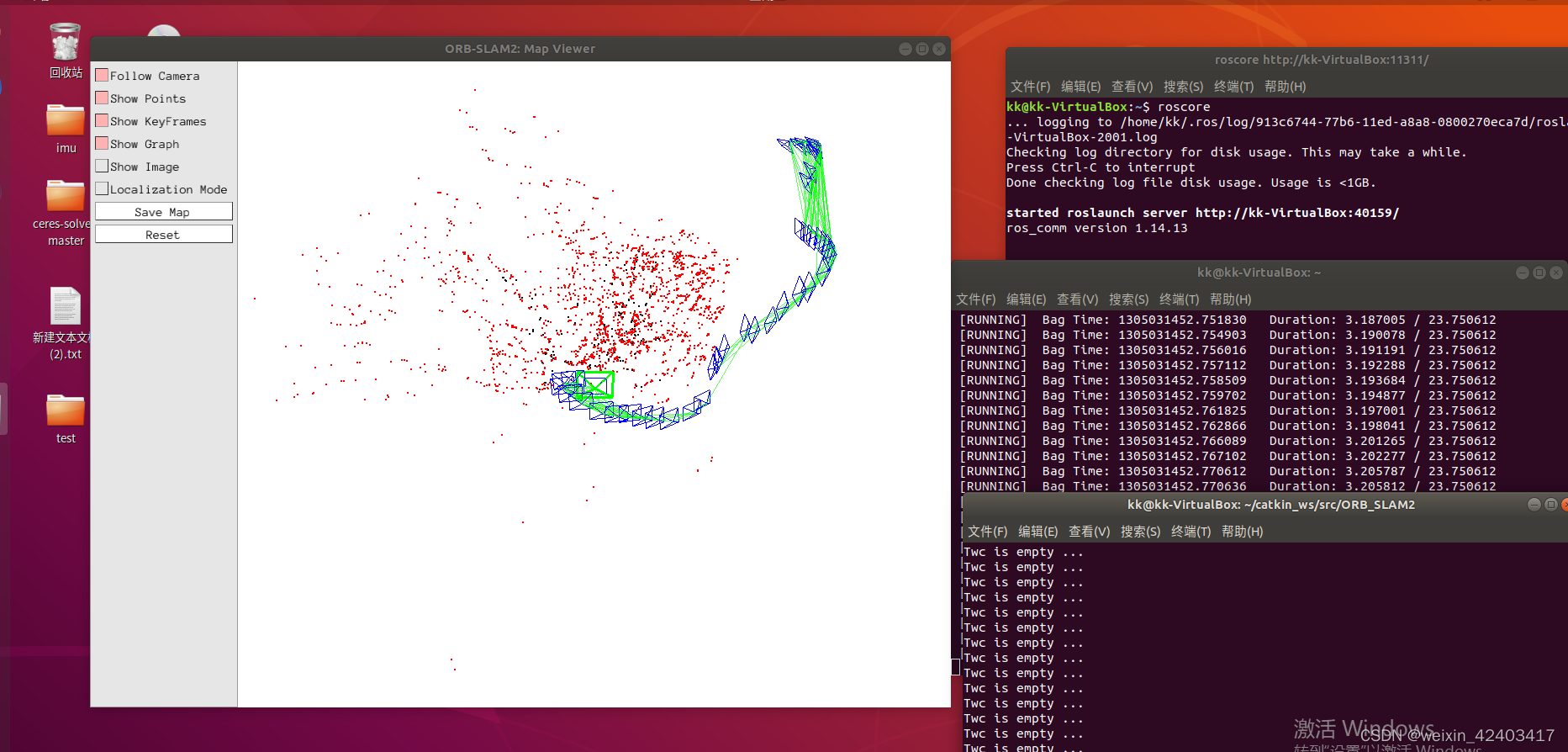
运行后效果如图:
















 2143
2143











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











