







src/transformFusion.cpp
主要功能是融合粗、精配准的里程计信息。
...
//将粗配准的里程计信息与精配准的里程计信息融合计算
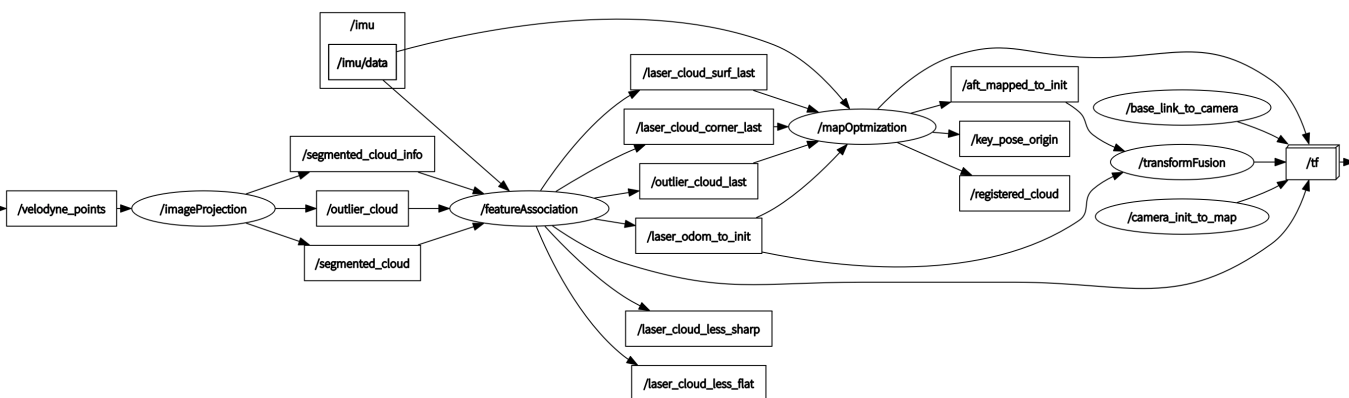
subLaserOdometry = nh.subscribe<nav_msgs::Odometry>("/laser_odom_to_init", 5, src/transformFusion.cpp
主要功能是融合粗、精配准的里程计信息。
...
//将粗配准的里程计信息与精配准的里程计信息融合计算
subLaserOdometry = nh.subscribe<nav_msgs::Odometry>("/laser_odom_to_init", 5,  3889
2819
3889
2819











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















