







ceres学习
功能
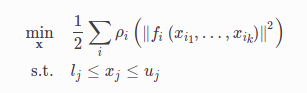
Ceres 可以解决以下形式的边界约束鲁棒化非线性最小二乘问题
其中,
ρ
i
(
∣
∣
f
i
(
x
i
1
,
.
.
.
,
x
i
k
)
∣
∣
2
)
ρ_i(||f_i(x_{i_1},..., x_{i_k})||^2)
ρi(∣∣fi(xi1,...,xik)∣∣2)被称为ResidualBlock;
[
x
i
1
,
.
.
.
,
x
i
k
]
[x_{i_1},..., x_{i_k}]
[xi1,...,xik]称为ParameterBlock;
l
j
l_j
lj 和
u
j
u_j
uj 是参数块的边界,
ρ
i
ρ_i
ρi 是一个LossFunction, LossFunction是标量函数,用于减少异常值对非线性最小二乘问题的解决方案的影响,通常为衡等变换.
hello world
待优化问题:

评估函数CostFunction为
f
(
x
)
=
10
−
x
f(x)=10-x
f(x)=10−x
ceres求解步骤
- 定义CostFuntion,通过函数重载运算操作符定义代价函数,就是形式里面的f(x)
- 构建Problem,设置代价函数,AutoDiffCostFunction将刚刚建立的CostFunctor 结构的一个实例作为输入,自动生成其微分并且赋予其一个CostFunction 类型的接口。调用AddResidualBlock将误差添加到目标函数中,由于优化需要梯度,我们有三种选择:
1) 使用Ceres自带的自动求导(Auto Diff)
2)使用数值求导(Numeric Diff)
3)使用自己求导的解析求导形式,提供给ceres。 - 配置Solver,在options里可以配置各种优化的选项,可以选择Line Search或者Trust Region、迭代次数、步长等等
- 定义Summary
- 开始优化Solve
- 输出结果SUmmary.BriefReport
#include <iostream>
#include <ceres/ceres.h>
#include "glog/logging.h"
using ceres::AutoDiffCostFunction;
using ceres::CostFunction;
using ceres::Problem;
using ceres::Solve;
using ceres::Solver;
using namespace std;
//1. 定义CostFuntion
struct CostFunctor{
template<typename T>
bool operator()(const T* const x, T*residual)const{
residual[0] = T(10.0) - x[0];
return true;
}
};
int main(int argc, char** argv)
{
//初始化
double init_x = 5.0;
double x = init_x;
//2. 构建问题
Problem problem;
//设置目标函数,AutoDiffCostFunction将刚刚建立的CostFunctor 结构的一个实例作为输入,自动生成其微分并且赋予其一个CostFunction 类型的接口
CostFunction* cost_function =
new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);
//添加误差项,调用AddResidualBlock将误差添加到目标函数中
problem.AddResidualBlock(cost_function, nullptr, &x);
//3. 调用solve函数求解,在options里可以配置各种优化的选项,可以选择Line Search或者Trust Region、迭代次数、步长等等
Solver::Options options;
options.minimizer_progress_to_stdout = true;
//4. 定义Summary
Solver::Summary summary;
//5. 开始优化Solve
Solve(options, &problem, &summary);
//6.输出结果SUmmary.BriefReport
cout<<summary.BriefReport()<<"\n";
cout<<"x: "<<init_x<<" -> "<<x<<"\n";
return 0;
}
cmakelist
cmake_minimum_required(VERSION 2.8)
project(p1)
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-O3" )
include_directories("/usr/include/eigen3")
find_package( Ceres REQUIRED )
include_directories( ${CERES_INCLUDE_DIRS} )
add_executable(p1 main.cpp)
target_link_libraries(p1 Ceres::ceres)
Ceres学习笔记之CMakeLists写法总结https://blog.csdn.net/sinat_28752257/article/details/82758546
数值法求导(Numeric Derivatives)
在某些情况下,像在Hello World中一样定义一个代价函数是不可能的。比如在求解残差值(residual)的时候调用了一个库函数,而这个库函数的内部算法你根本无法干预。在这种情况下数值微分算法就派上用场了。用户定义一个CostFunctor来计算残差值,并且构建一个NumericDiffCostFunction数值微分代价函数。
Ceres官方更加推荐自动微分算法,因为C++模板类使自动算法有更高的效率。数值微分算法通常来说计算更复杂,收敛更缓慢。
比如对于 f(x)=10−x 对应函数体如下:
struct NumericDiffCostFunctor {
bool operator()(const double* const x, double* residual) const {
residual[0] = 10.0 - x[0];
return true;
}
}
//struct CostFunctor {
// template <typename T>
// bool operator()(const T* const x, T* residual) const {
// residual[0] = T(10.0) - x[0];
// return true;
// }
//};
可以发现,没用模板类。
然后继续添加Problem
CostFunction* cost_function =
new NumericDiffCostFunction<NumericDiffCostFunctor, ceres::CENTRAL, 1, 1>(
new NumericDiffCostFunctor);
problem.AddResidualBlock(cost_function, NULL, &x);
// CostFunction* cost_function =
// new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);
// problem.AddResidualBlock(cost_function, NULL, &x);
//
在用Nummeric算法时需要额外给定一个参数ceres::CENTRAL ,这个参数告诉计算机如何计算导数。
ceres:: FORWARD

ceres::CENTRAL

ceres::RIDDERS

注:随着步长h的下降,误差逐渐减小,但由于舍入误差,h进一步下降时,误差增大。
Central Differences 的成本大约是 Forward Differences 的两倍,并且 Ridders 方法的显着提高了准确性但运行时间增加了一个数量级。
解析法求导(Analytic Derivatives)
有些时候,应用自动求解算法时不可能的。比如在某些情况下,计算导数的时候,使用闭合解(closed form,也被称为解析解)会比使用自动微分算法中的链式法则(chain rule)更有效率。
解析解(analytical solution):
就是一些严格的公式,给出任意的自变量就可以求出其因变量,也就是问题的解。他人可以利用这些公式计算各自的问题。所谓的解析解是一种包含:分式、三角函数、指数、对数甚至无限级数等基本函数的解的形式。对任一独立变量,我们皆可将其带入解析函数求得正确的相依变量。因此,解析解也被称为闭式解(closed-form solution)。数值解(numerical solution): 是采用某种计算方法,如有限元的方法, 数值逼近,插值的方法得到的解。别人只能利用数值计算的结果,而不能随意给出自变量并求出计算值。此方法所求得的相依变量为一个个分离的数值。
提供您自己的残差和雅可比计算代码:
比如对于 f(x)=10−x
class QuadraticCostFunction : public ceres::SizedCostFunction<1, 1> {
public:
virtual ~QuadraticCostFunction() {}
virtual bool Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const {
const double x = parameters[0][0];
residuals[0] = 10 - x;
// Compute the Jacobian if asked for.
if (jacobians != nullptr && jacobians[0] != nullptr) {
jacobians[0][0] = -1;
}
return true;
}
};
实现 CostFunction对象有点繁琐。我们建议除非您有充分的理由自己管理雅可比计算,否则您可以使用AutoDiffCostFunction或 NumericDiffCostFunction构建残差块。
添加problem
CostFunction* cost_function = new QuadraticCostFunction;
problem.AddResidualBlock(cost_function, NULL, &x);
整体代码
#include <iostream>
#include <ceres/ceres.h>
#include "glog/logging.h"
using ceres::AutoDiffCostFunction;
using ceres::NumericDiffCostFunction;
using ceres::CostFunction;
using ceres::Problem;
using ceres::Solve;
using ceres::Solver;
using namespace std;
class QuadraticCostFunction : public ceres::SizedCostFunction<1, 1> {
public:
virtual ~QuadraticCostFunction() {}
virtual bool Evaluate(double const* const* parameters,
double* residuals,
double** jacobians) const {
const double x = parameters[0][0];
residuals[0] = 10 - x;
// Compute the Jacobian if asked for.
if (jacobians != nullptr && jacobians[0] != nullptr) {
jacobians[0][0] = -1;
}
return true;
}
};
int main(int argc, char** argv) {
double init_x = 5.0;
double x = init_x;
Problem problem;
CostFunction* cost_function = new QuadraticCostFunction;
problem.AddResidualBlock(cost_function, NULL, &x);
Solver::Options options;
options.minimizer_progress_to_stdout = true;
Solver::Summary summary;
Solve(options, &problem, &summary);
cout<<summary.BriefReport()<<"\n";
cout<<"x: "<<init_x<<" -> "<<x<<"\n";
return 0;
}
其他
计算导数是迄今为止使用 Ceres 最复杂的部分,根据情况,用户可能需要更复杂的计算导数的方法。本节只是触及如何向 Ceres 提供Derivatives的皮毛。一旦你习惯使用 NumericDiffCostFunction,并AutoDiffCostFunction建议在考虑看看DynamicAutoDiffCostFunction, CostFunctionToFunctor,NumericDiffFunctor以及 ConditionedCostFunction构建和计算成本函数的更先进的方法。
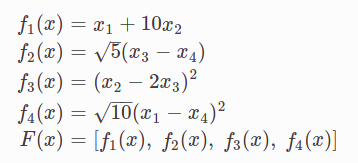
鲍威尔函数优化
#include <iostream>
#include <ceres/ceres.h>
#include "glog/logging.h"
using ceres::AutoDiffCostFunction;
using ceres::CostFunction;
using ceres::Problem;
using ceres::Solve;
using ceres::Solver;
using namespace std;
struct f1{
template<typename T>
bool operator()(const T* const x1, const T* const x2, T*residual)const{
residual[0] = x1[0] + 10.0 * x2[0];
return true;
}
};
struct f2{
template<typename T>
bool operator()(const T* const x3, const T* const x4, T*residual)const{
residual[0] = sqrt(5.0) * (x3[0] - x4[0]);
return true;
}
};
struct f3{
template<typename T>
bool operator()(const T* const x2, const T* const x3, T*residual)const{
residual[0] = (x2[0] - 2.0 * x3[0]) * (x2[0] - 2.0 * x3[0]);
return true;
}
};
struct f4{
template<typename T>
bool operator()(const T* const x1, const T* const x4, T*residual)const{
residual[0] = sqrt(10.0) * (x1[0] - x4[0]) * (x1[0] - x4[0]);
return true;
}
};
int main(int argc, char** argv) {
double x1 = 3.0;
double x2 = -1.0;
double x3 = 0.0;
double x4 = 1.0;
Problem problem;
problem.AddResidualBlock(
new AutoDiffCostFunction<f1, 1, 1, 1>(new f1), nullptr, &x1, &x2);
problem.AddResidualBlock(
new AutoDiffCostFunction<f2, 1, 1, 1>(new f2), nullptr, &x3, &x4);
problem.AddResidualBlock(
new AutoDiffCostFunction<f3, 1, 1, 1>(new f3), nullptr, &x2, &x3);
problem.AddResidualBlock(
new AutoDiffCostFunction<f4, 1, 1, 1>(new f4), nullptr, &x1, &x4);
Solver::Options options;
options.max_num_iterations = 100;
options.linear_solver_type = ceres::DENSE_QR;
options.minimizer_progress_to_stdout = true;
std::cout << "Initial x1 = " << x1
<< ", x2 = " << x2
<< ", x3 = " << x3
<< ", x4 = " << x4
<< "\n";
Solver::Summary summary;
Solve(options, &problem, &summary);
cout<<summary.BriefReport()<<"\n";
std::cout << "Final x1 = " << x1
<< ", x2 = " << x2
<< ", x3 = " << x3
<< ", x4 = " << x4
<< "\n";
return 0;
}















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









