







 文章介绍了通过IMU阵列提升导航系统性能的研究,包括硬件设计、标定方法、杆臂影响修正和数据融合策略。静态Allan方差分析显示性能提高了3.67至3.72倍,动态导航性能在标定补偿后有显著提升。结论强调了标定补偿和适当规模的IMU阵列对性能优化的重要性,同时指出不能无限增加芯片数量来追求精度。
文章介绍了通过IMU阵列提升导航系统性能的研究,包括硬件设计、标定方法、杆臂影响修正和数据融合策略。静态Allan方差分析显示性能提高了3.67至3.72倍,动态导航性能在标定补偿后有显著提升。结论强调了标定补偿和适当规模的IMU阵列对性能优化的重要性,同时指出不能无限增加芯片数量来追求精度。
欢迎关注个人公众号:导航员学习札记
最近拜读了武汉大学i2Nav团队关于IMU阵列的文章,感觉写得挺好的。因此这篇博客主要是自己的学习笔记,简要整理一下我觉得有意义的一些结论,方便自己之后快速查阅。
如果感兴趣的话,最好还是去阅读原文收获更多、更完整的信息: IMU阵列动态导航性能研究和论文Improving the Navigation Performance of the MEMS IMU Array by Precise Calibration。
现在市场上也有很多使用了IMU阵列产品,个人觉得已经比较成熟。比如原极的IMU及组合导航产品,超核电子的IMU产品。
一、主要实验内容
-
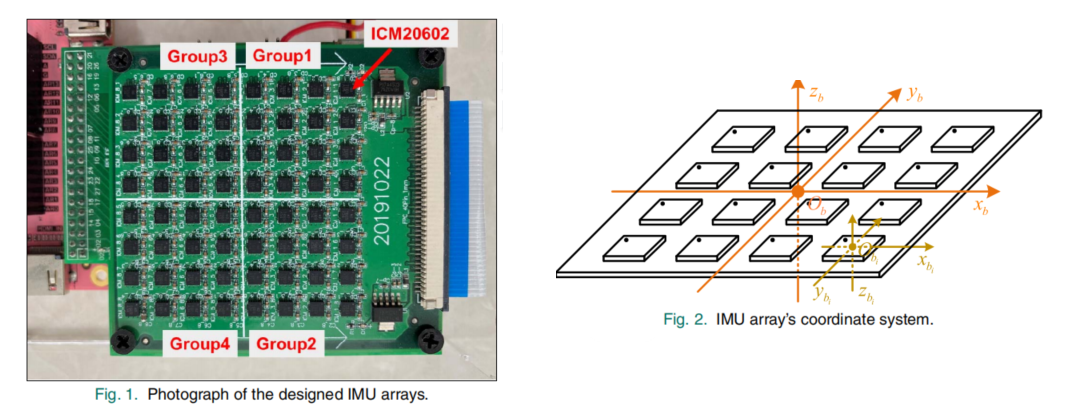
硬件设计: 4组IMU阵列,其中每组IMU阵列包含16个MEMS IMU芯片,设计如下图。
-
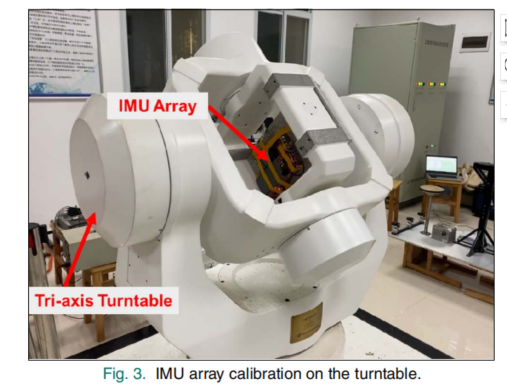
常温标定:在高精度三轴转台上,采用标准六位置法和角位置法分别对加速度计和陀螺仪的器件误差和安装角进行标定,并得到每个IMU芯片标定补偿的参数。标定模型如下式,包括了标度因素 S S S,交叉耦合误差 N N N,常值零偏 b b b,以及安装角 C b b i C_{b}^{bi} Cbbi, v v v代表了测量噪声。


-
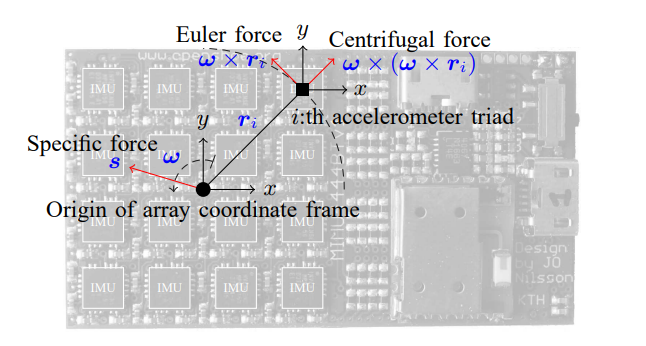
杆臂影响的修正:由于各个IMU芯片位置不同,因此将所有数据折合到同一个点,需要考虑杆臂对加速度测量值的影响,修正公式如下式。

另外一篇文章参考[3]中也有相关的示意图及公式。

-
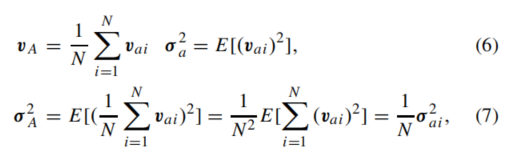
IMU数据融合:采用平均的方法计算每组IMU融合结果。理论上误差应减小为原来的sqrt(N)倍,即sqrt(16) = 4倍。
-
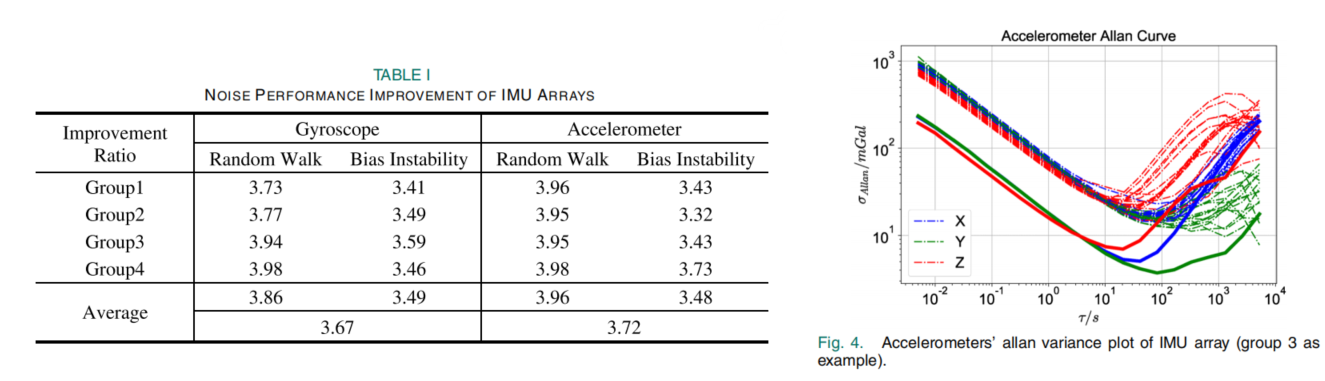
静态Allan方差性能评估:采集8小时静态数据,并对四组IMU分别做allan方差,评估IMU阵列的噪声和零偏不稳定性参数。IMU阵列中陀螺仪和加速度计静态性能分别提高了3.67倍和3.72倍,均接近理论值(即sqrt(16) = 4倍)。
-
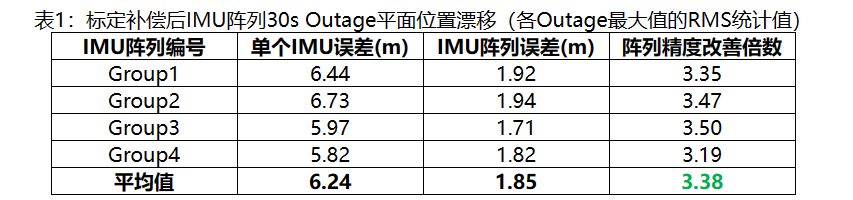
动态GNSS RTK/INS组合导航性能评估:动态导航性能采用GNSS RTK/INS组合导航模式测试,载体为SUV测试车。数据处理采用事后处理,以人为模拟的30s GNSS Outage期间的平面位置误差作为其性能评估指标。
(1)表1:标定补偿后的IMU阵列动态导航性能有3.38倍的提高,接近理论值4倍。
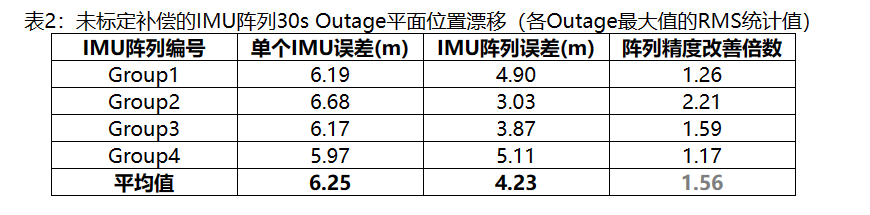
(2)表2:未进行标定补偿的IMU阵列虽然也有所提高,但只有约1.56倍
二、相关结论
这篇论文我认为比较重要的结论有三个:
(1) 前人的相关工作已经证实了IMU阵列的静态噪声性能相比于单个IMU芯片有接近sqrt(N)倍的改善,与理论预测相符;
(2)要想动态性能指标也接近理论值,需要通过标定对器件误差进行补偿,尤其是IMU芯片器件误差中的交轴耦合和IMU芯片的安装角误差,才能有效提高IMU阵列的动态导航性能;
(3)不可以无限制地增加IMU芯片数量来不断提高阵列的精度。一方面IMU阵列规模越大,对其精度预期就越高,但IMU标定精度就有个上限。另一方面,在硬件电路设计需要保证数据正常及IMU芯片采样的时标统一,而这些随着阵列规模增大都更加难以保证。
参考文章
[1] IMU阵列动态导航性能研究
[2] Wang, H. Tang, T. Zhang, Q. Chen, J. Shi and X. Niu.Improving the Navigation Performance of the MEMS IMU Array by Precise Calibration. IEEE Sensors Journal, vol. 21, no. 22, pp. 26050-26058, 15 Nov.15, 2021. DOI: 10.1109/JSEN.2021.3118455.
[3] Skog I , Nilsson J O , Hndel P , et al. Inertial Sensor Arrays, Maximum Likelihood, and Cram\'er-Rao Bound[J]. IEEE Transactions on Signal Processing, 2016, 64(16):4218-4227.

















 1267
1267

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









